

如果您无法下载资料,请参考说明:
1、部分资料下载需要金币,请确保您的账户上有足够的金币
2、已购买过的文档,再次下载不重复扣费
3、资料包下载后请先用软件解压,在使用对应软件打开
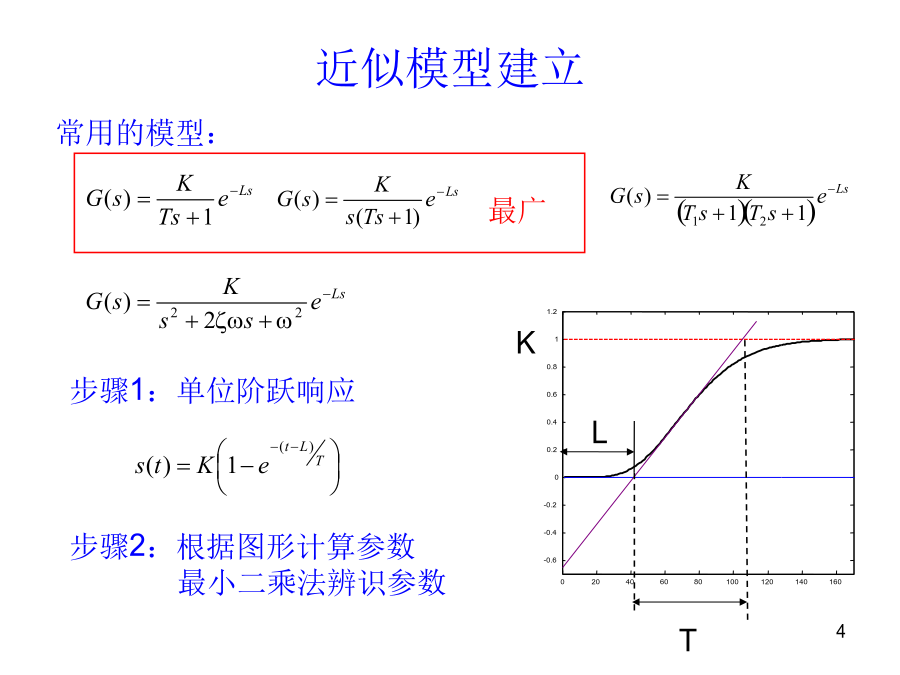
第六章PID控制器及其应用段小刚:博士电话:88660476邮箱:xgduan@csu.edu.cn办公室:机电楼A322目录近似模型建立近似模型建立建模实例K1、PID控制器PID控制器的基本原理常用PID控制器的传递函数3.PID控制器三个环节的作用PID的结构(比例控制器)校正的基本概念校正的基本概念校正的基本概念校正(PD控制器)校正(PI控制器)校正(PID控制器)控制性能分析(PD控制器)单位斜坡输入r(t)=t,加PD控制器不能消除稳态误差,其稳态误差可表示为:闭环传递函数:为了保证一定的稳定裕度,即要求所有闭环极点离虚轴在合适的范围:开环传递函数6、数字PID控制器增量式数字PID控制算法7、参数整定方法(试凑法)参数整定方法(ZN阶跃响应法)参数整定方法(ZN频率响应法)参数整定方法(ZN继电器反馈法)参数整定方法(直接解析法)参数整定方法(增益与相位裕度法)原子间作用力AFM的悬臂建模仿真PID控制实例实验过程与模型建立控制效果PID控制仿真实例锻造操作机实验样机锻造操作机实验样机











你相****光吗
 实名认证
实名认证
 内容提供者
内容提供者
最近下载




