

如果您无法下载资料,请参考说明:
1、部分资料下载需要金币,请确保您的账户上有足够的金币
2、已购买过的文档,再次下载不重复扣费
3、资料包下载后请先用软件解压,在使用对应软件打开
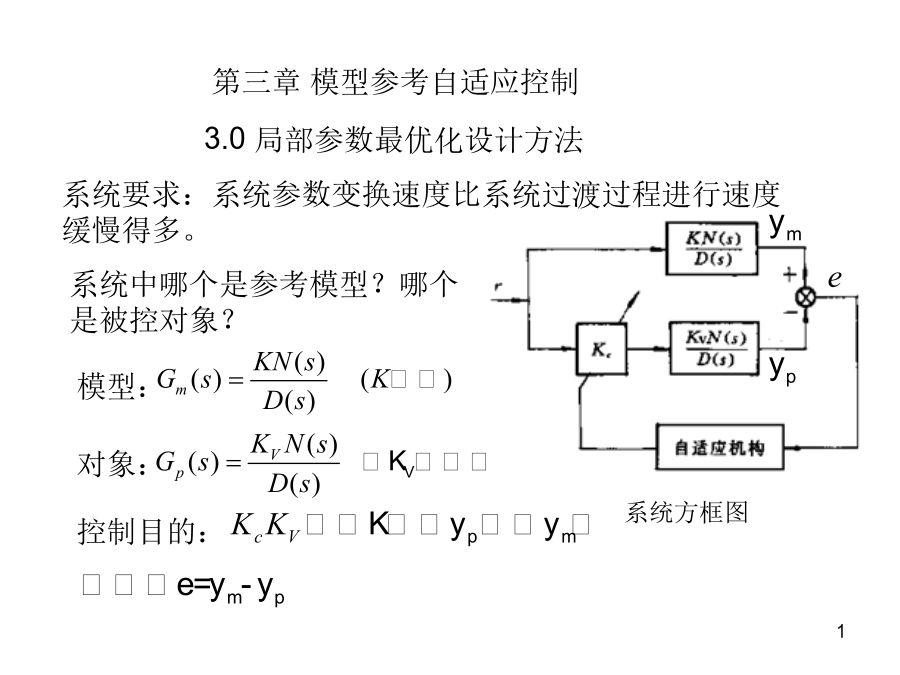
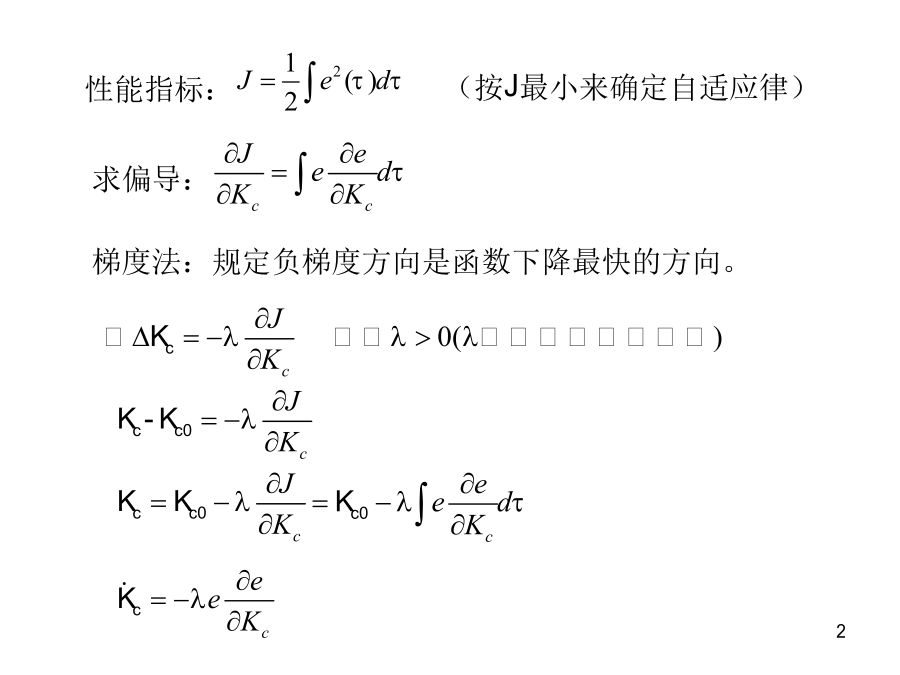
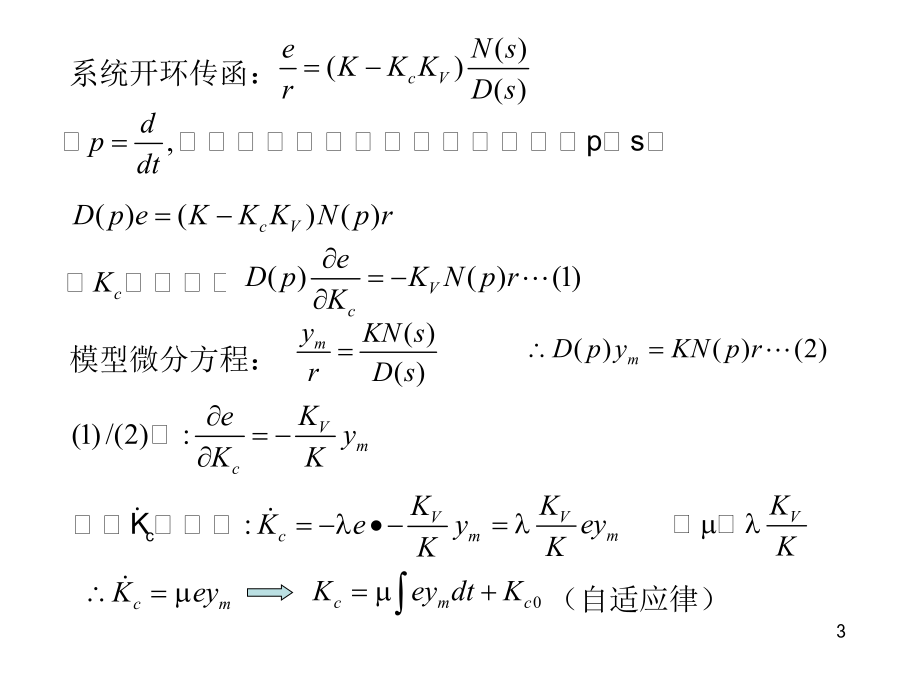
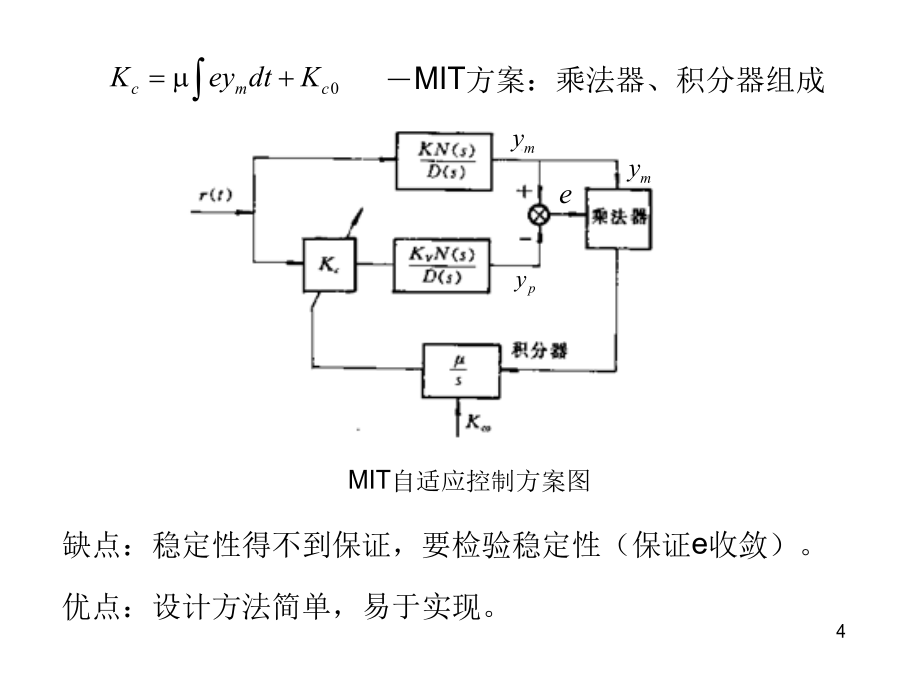
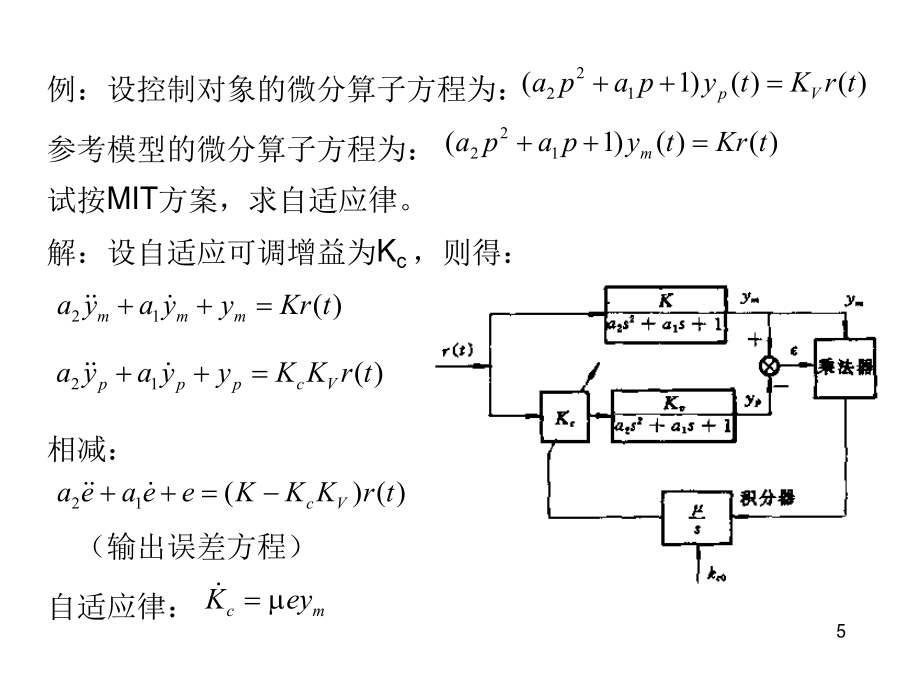
第三章模型参考自适应控制性能指标:系统开环传函:-MIT方案:乘法器、积分器组成例:设控制对象的微分算子方程为:检验稳定性:假设r(t)为阶跃信号,r(t)=R,并设KV缓慢变化,3.1一阶系统的模型参考自适应控制时域描述:输出误差:判断稳定性:注意:M(s)须严正实才渐近稳定。二、自适应系统结构系统状态变量构成的模型参考自适应控制用状态变量构成自适应控制图(可调系统状态方程)在理想情况时,上式后两项应等于0,设F和K的理想值分别为2、求导,化简得F(t)的自适应律:特例1图具有可调增益的自适应系统特例2e例:设系统的参考模型方程为253.2模型参考自适应控制(高阶)2、参考模型:二、控制器结构讨论n-m=1时纳朗特兰方案:其中:N(s)为(n-1)阶首1hurwitz多项式则要求下列各式成立:前馈环节作用:自适应律(可证明):C(s):n-2=0阶、非首1多项式,设C(s)=C在W(s)中要求分子、分母有公因子(s+1),得三、讨论n-m=2的情况n-m=2时的自适应控制系统结构图n-m=2时的自适应控制系统结构等效图











你相****光吗
 实名认证
实名认证
 内容提供者
内容提供者
最近下载




