



如果您无法下载资料,请参考说明:
1、部分资料下载需要金币,请确保您的账户上有足够的金币
2、已购买过的文档,再次下载不重复扣费
3、资料包下载后请先用软件解压,在使用对应软件打开
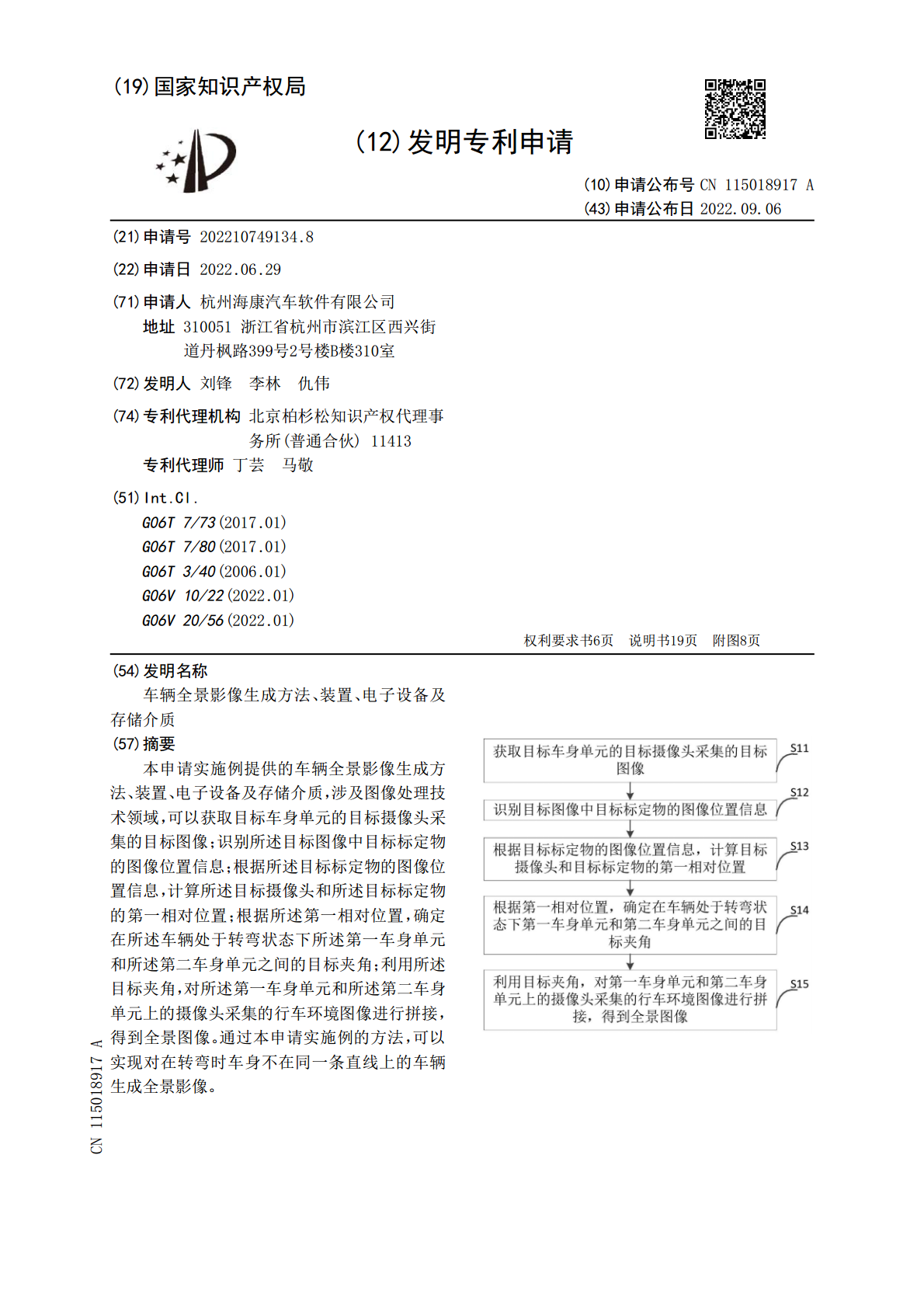
(19)国家知识产权局(12)发明专利申请(10)申请公布号CN115018917A(43)申请公布日2022.09.06(21)申请号202210749134.8(22)申请日2022.06.29(71)申请人杭州海康汽车软件有限公司地址310051浙江省杭州市滨江区西兴街道丹枫路399号2号楼B楼310室(72)发明人刘锋李林仇伟(74)专利代理机构北京柏杉松知识产权代理事务所(普通合伙)11413专利代理师丁芸马敬(51)Int.Cl.G06T7/73(2017.01)G06T7/80(2017.01)G06T3/40(2006.01)G06V10/22(2022.01)G06V20/56(2022.01)权利要求书6页说明书19页附图8页(54)发明名称车辆全景影像生成方法、装置、电子设备及存储介质(57)摘要本申请实施例提供的车辆全景影像生成方法、装置、电子设备及存储介质,涉及图像处理技术领域,可以获取目标车身单元的目标摄像头采集的目标图像;识别所述目标图像中目标标定物的图像位置信息;根据所述目标标定物的图像位置信息,计算所述目标摄像头和所述目标标定物的第一相对位置;根据所述第一相对位置,确定在所述车辆处于转弯状态下所述第一车身单元和所述第二车身单元之间的目标夹角;利用所述目标夹角,对所述第一车身单元和所述第二车身单元上的摄像头采集的行车环境图像进行拼接,得到全景图像。通过本申请实施例的方法,可以实现对在转弯时车身不在同一条直线上的车辆生成全景影像。CN115018917ACN115018917A权利要求书1/6页1.一种车辆全景影像生成方法,其特征在于,应用于包括第一车身单元和第二车身单元的车辆,每个车身单元的至少第一侧面和第二侧面上分别设置有摄像头和标定物,所述第一侧面和所述第二侧面是沿车辆行驶方向的左右两个车身侧面;所述方法包括:获取目标车身单元的目标摄像头采集的目标图像,其中,所述目标摄像头指在车辆处于转弯状态下处于所述目标车身单元的内侧的摄像头;识别所述目标图像中目标标定物的图像位置信息,其中,所述目标标定物和所述目标摄像头位于不同的车身单元;根据所述目标标定物的图像位置信息,计算所述目标摄像头和所述目标标定物的第一相对位置;根据所述第一相对位置,确定在所述车辆处于转弯状态下所述第一车身单元和所述第二车身单元之间的目标夹角;利用所述目标夹角,对所述第一车身单元和所述第二车身单元上的摄像头采集的行车环境图像进行拼接,得到全景图像。2.根据权利要求1所述的方法,其特征在于:所述目标车身单元包括所述车辆处于转弯状态下所述第一车身单元和/或所述第二车身单元;相应的,所述获取目标车身单元的目标摄像头采集的目标图像,至少包括以下之一:获取所述第一车身单元的目标摄像头采集的目标图像;其中,所述目标图像上至少包括在所述车辆处于转弯状态下处于所述第二车身单元的内侧的第二标定物;获取所述第二车身单元的目标摄像头采集的目标图像;其中,所述目标图像上至少包括在所述车辆处于转弯状态下处于所述第一车身单元的内侧的第一标定物。3.根据权利要求2所述的方法,其特征在于,所述识别所述目标图像中目标标定物的图像位置信息,包括:识别所述第一车身单元的目标摄像头采集的目标图像中,所述第二车身单元的内侧的第二标定物的图像位置信息;和/或,识别所述第二车身单元的目标摄像头采集的目标图像中,所述第一车身单元的内侧的第一标定物的图像位置信息。4.根据权利要求3所述的方法,其特征在于,所述根据所述第一相对位置,确定在所述车辆处于转弯状态下所述第一车身单元和所述第二车身单元之间的目标夹角,包括:根据所述第一车身单元的目标摄像头和所述第二车身单元的内侧的第二标定物的第一相对位置,确定在所述车辆处于转弯状态下所述第一车身单元和所述第二车身单元之间的第一旋转角;根据所述第二车身单元的目标摄像头和所述第一车身单元的内侧的第一标定物的第一相对位置,确定在所述车辆处于转弯状态下所述第一车身单元和所述第二车身单元之间的第二旋转角;将所述第一旋转角和所述第二旋转角的平均值,确定为所述车辆处于转弯状态下所述第一车身单元和所述第二车身单元之间的目标夹角。2CN115018917A权利要求书2/6页5.根据权利要求3所述的方法,其特征在于,所述根据所述第一相对位置,确定在所述车辆处于转弯状态下所述第一车身单元和所述第二车身单元之间的目标夹角,包括:根据所述第一相对位置、车辆未转弯状态下所述目标摄像头和所述目标标定物的第二相对位置、车辆未转弯状态下所述目标标定物和预设旋转点的第三相对位置,计算在预设坐标系下所述预设旋转点的第一坐标位置、对应车辆未转弯状态下所述目标摄像头的第二坐标位置、对应车辆转弯状态下所述目标摄像头的第三坐标位置;其中,所述预设旋转点为所述第一车身单元和所述第二车











论文****酱吖
 实名认证
实名认证
 内容提供者
内容提供者
最近下载




