




如果您无法下载资料,请参考说明:
1、部分资料下载需要金币,请确保您的账户上有足够的金币
2、已购买过的文档,再次下载不重复扣费
3、资料包下载后请先用软件解压,在使用对应软件打开
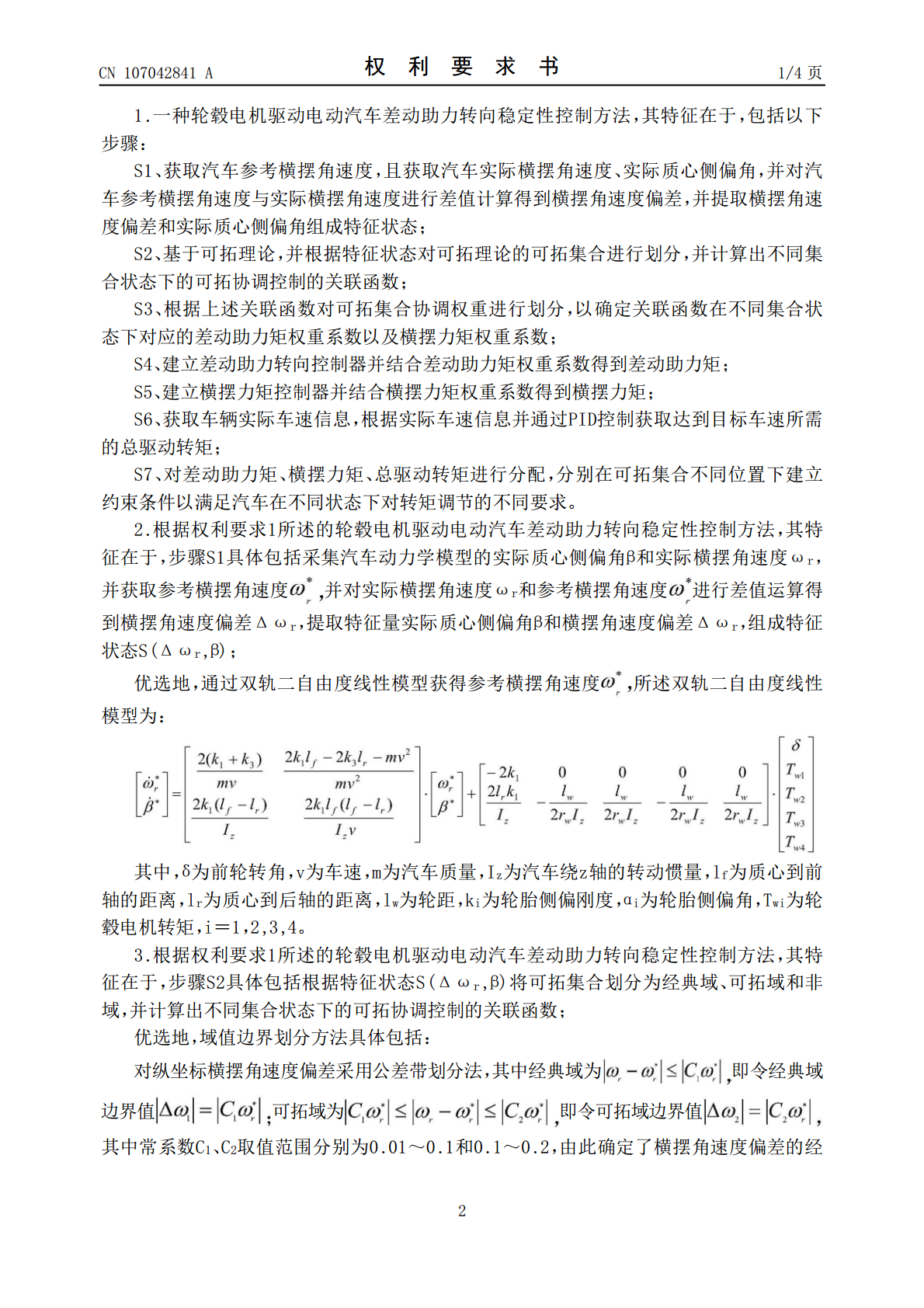
(19)中华人民共和国国家知识产权局(12)发明专利申请(10)申请公布号CN107042841A(43)申请公布日2017.08.15(21)申请号201611153387.X(22)申请日2016.12.14(71)申请人合肥工业大学地址230000安徽省合肥市屯溪路193号(72)发明人汪洪波陈无畏孙晓文(74)专利代理机构合肥市长远专利代理事务所(普通合伙)34119代理人屈科辉傅磊(51)Int.Cl.B62D5/00(2006.01)B62D7/14(2006.01)B62D6/00(2006.01)B62D137/00(2006.01)G06F17/50(2006.01)权利要求书4页说明书10页附图6页(54)发明名称一种轮毂电机驱动电动汽车差动助力转向稳定性控制方法(57)摘要本发明公开了一种轮毂电机驱动电动汽车差动助力转向稳定性控制方法,包括以下步骤:S1、提取横摆角速度偏差和实际质心侧偏角组成特征状态;S2、基于可拓理论,计算出不同集合状态下的可拓协调控制的关联函数;S3、根据上述关联函数确定关联函数在不同集合状态下对应的差动助力矩权重系数以及横摆力矩权重系数;S4、建立差动助力转向控制器并结合差动助力矩权重系数得到差动助力矩;S5、建立横摆力矩控制器并结合横摆力矩权重系数得到横摆力矩;S6、根据实际车速信息并通过PID控制获取达到目标车速所需的总驱动转矩;S7、对差动助力矩、横摆力矩、总驱动转矩进行分配,并建立约束条件以满足汽车在不同状态下对转矩调节的不同要求。CN107042841ACN107042841A权利要求书1/4页1.一种轮毂电机驱动电动汽车差动助力转向稳定性控制方法,其特征在于,包括以下步骤:S1、获取汽车参考横摆角速度,且获取汽车实际横摆角速度、实际质心侧偏角,并对汽车参考横摆角速度与实际横摆角速度进行差值计算得到横摆角速度偏差,并提取横摆角速度偏差和实际质心侧偏角组成特征状态;S2、基于可拓理论,并根据特征状态对可拓理论的可拓集合进行划分,并计算出不同集合状态下的可拓协调控制的关联函数;S3、根据上述关联函数对可拓集合协调权重进行划分,以确定关联函数在不同集合状态下对应的差动助力矩权重系数以及横摆力矩权重系数;S4、建立差动助力转向控制器并结合差动助力矩权重系数得到差动助力矩;S5、建立横摆力矩控制器并结合横摆力矩权重系数得到横摆力矩;S6、获取车辆实际车速信息,根据实际车速信息并通过PID控制获取达到目标车速所需的总驱动转矩;S7、对差动助力矩、横摆力矩、总驱动转矩进行分配,分别在可拓集合不同位置下建立约束条件以满足汽车在不同状态下对转矩调节的不同要求。2.根据权利要求1所述的轮毂电机驱动电动汽车差动助力转向稳定性控制方法,其特征在于,步骤S1具体包括采集汽车动力学模型的实际质心侧偏角β和实际横摆角速度ωr,并获取参考横摆角速度并对实际横摆角速度ωr和参考横摆角速度进行差值运算得到横摆角速度偏差Δωr,提取特征量实际质心侧偏角β和横摆角速度偏差Δωr,组成特征状态S(Δωr,β);优选地,通过双轨二自由度线性模型获得参考横摆角速度所述双轨二自由度线性模型为:其中,δ为前轮转角,v为车速,m为汽车质量,Iz为汽车绕z轴的转动惯量,lf为质心到前轴的距离,lr为质心到后轴的距离,lw为轮距,ki为轮胎侧偏刚度,αi为轮胎侧偏角,Twi为轮毂电机转矩,i=1,2,3,4。3.根据权利要求1所述的轮毂电机驱动电动汽车差动助力转向稳定性控制方法,其特征在于,步骤S2具体包括根据特征状态S(Δωr,β)将可拓集合划分为经典域、可拓域和非域,并计算出不同集合状态下的可拓协调控制的关联函数;优选地,域值边界划分方法具体包括:对纵坐标横摆角速度偏差采用公差带划分法,其中经典域为即令经典域边界值可拓域为即令可拓域边界值其中常系数C1、C2取值范围分别为0.01~0.1和0.1~0.2,由此确定了横摆角速度偏差的经2CN107042841A权利要求书2/4页典域和可拓域边界;在横坐标划分中,可拓域边界为β2=arctan(0.02μg),μ为路面附着系数;经典域边界通过横摆角速度增益的线性区和非线性区的界限确定,在某一车速下给前轮转角输入逐渐增大的正弦转角,得到前轮转角和横摆角速度的关系曲线,观察曲线中线性区和非线性区可得,当前轮转角小于极限值δmax时,横摆角速度和前轮转角呈现线性关系,据此拟合出不同车速下前轮转角极限值δmax与车速v关系式,即其中,a、b、c、d为拟合数据;将δmax单独输入到双轨二自由度参考模型式中可确定此时的经典域边界值β1;根据特征状态在可拓集合的位置,计算出可拓协调控制的关联函数K(S);其中,D(P3,<P5,P2>,<P4,P1>)=ρ(P3,<P5,P2>)-ρ(P3,











书生****写意
 实名认证
实名认证
 内容提供者
内容提供者
最近下载




