


如果您无法下载资料,请参考说明:
1、部分资料下载需要金币,请确保您的账户上有足够的金币
2、已购买过的文档,再次下载不重复扣费
3、资料包下载后请先用软件解压,在使用对应软件打开
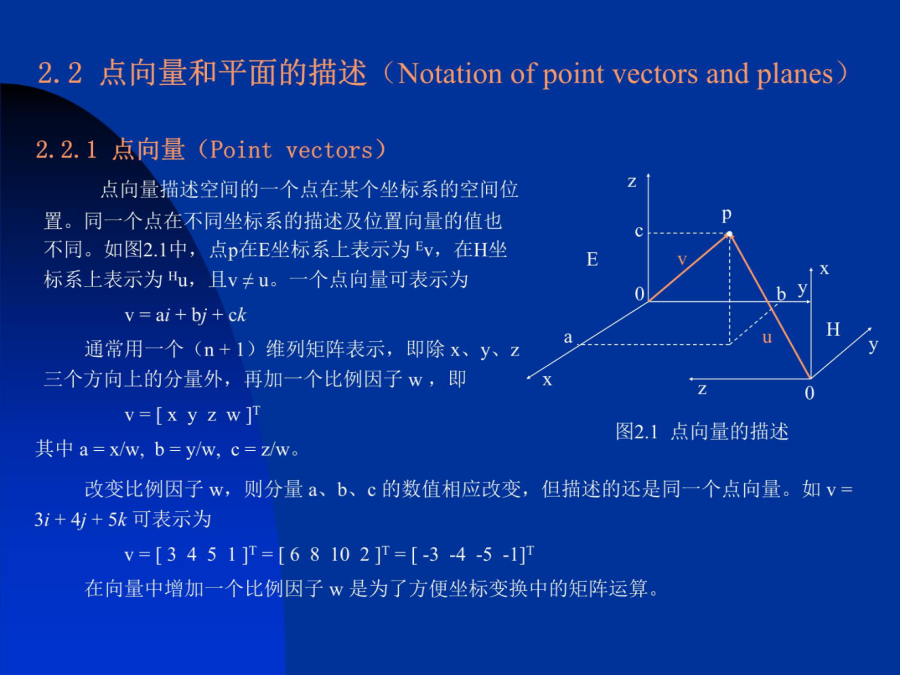
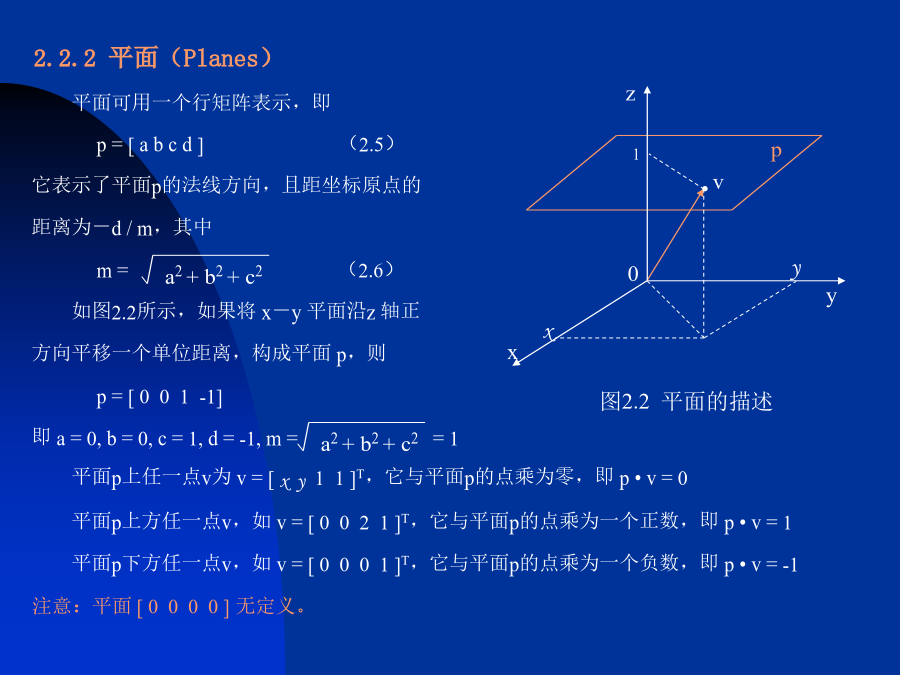
第二章齐次坐标变换ChapterⅡHomogeneousTransformation2.1引言(Introduction)已知两个向量 a=axi+ayj+azk b=bxi+byj+bzk(2.1) 向量的点积是标量。用“·”来定义向量点积,即 a·b=axbx+ayby+azbz(2.2) 向量的叉积是一个垂直于由叉积的两个向量构成的平面的向量。用“×”表示叉积,即 a×b=(aybz¯azby)i+(azbx¯axbz)j+(axby¯ayby)k(2.3) 可用行列式表示为 ijk a×b=axayaz(2.4) bxbybz 2.2.2平面(Planes)H空间的变换是由4×4矩阵来完成的,它可以表示平移、旋转、扩展和透视等各种变换。如已知点u(在平面p上),它的变换v(在平面q上)用矩阵积表示为 v=Hu(2.7) 其中H为4×4变换矩阵,u和v为4×1的点列向量,相应的平面p到q的变换是 q=pH-1(2.8) 其中H-1为H的逆阵,p和q为1×4的平面行向量。 经变换后的平面向量q与点向量v的点乘为 q·v=pH-1·Hu=p·u(2.9) 与变换前平面p与点u的点乘相等,证明了变换的等效性。2.4平移变换(Translationtransformation)【例2.1】对点向量u=[2321]T进行平移,平移向量为h=[4-371]T,则平移后的向量为v=[6091]T,或 100426 010―330 v=H∙u=00172=9 000111 点向量的平移过程如图2.3所示。 对平面的平移则用H-1进行变换,如对平面 p=[100-2]进行H变换为平面q,则根据变 换原理有 100-4 0103 q=pH-1=[100-2]001-7 0001 =[100-6] 平面p=[100-2]是y-z平面沿x正方向移动2个单位形成的平面(图2.3),点u=[2321]T是平面p上的一个点,它们的点乘p∙u=0。经H变换后的平面q=[100-6]是y-z平面沿x正方向移动6个单位形成的平面,点v=[6091]T是平面q上一个点,平面q与点v的点乘也应是零,即q∙v=0,说明变换前后的结果不变,证明H变换是正确的。2.5旋转变换(Rotationtransformation)【例2.2】点u=7i+3j+2k,它绕z轴旋转90°为v, 经式(2.14)变换得到(sinθ=1,cosθ=0) 0-1007-3 100037 v=Rot(z,90°)=00102=2 000111 起始点u和终点v如图2.5所示。如将v点再绕y轴 旋转90°得到w。用式(2.13)变换得到 0010-32 010077 w=Rot(y,90°)=-10002=3 000111 结果如图2.6所示。如果将上述两次旋转结合起来, 写成一个表达式得到 w=Rot(y,90°)v=Rot(y,90°)Rot(z,90°)u 用两个变换矩阵Rot(y,90°)、Rot(z,90°)和起始 点u代入上式计算的结果与前面分两次计算的结果相同。为此,先将点u绕z轴旋转90°,然后再绕y轴旋转90°,我们得到 00100-10072 0100100037 w=Rot(y,90°)Rot(z,90°)u=-100000102=3 0001000111 如果按着逆序旋转,首先绕y轴旋转90°,然后再绕z轴旋转90°,其结果为 0-10000107-3 1000010032 w=Rot(z,90°)Rot(y,90°)u=0100-10002=-7 0001000111 逆序旋转的结果如图2.7所示。显然,变换的顺序不同,其结果也不同。这从 矩阵相乘是不可交换的(AB≠BA)也可以得到证明。如对经过两次旋转变换得到的点向量w再进行一次平移(平移向量为h=[4-371]T), 则可得到如图2.8所示的点向量n。变换过程如下 100426 010-374 n=Trans(4,-3,7)w=00173=10 000111 2.6坐标系(Coordinateframes)这个新坐标系的x、y、z轴的方向分别是[0,1,0,0]T、[0,0,1,0]T和[1,0,0,0]T,它是由单位向量的H变换减去这个坐标原点的向量得到的。这些方向向量相应于变换矩阵的前三列(见式(2.15))。可见,H变换矩阵描述了一个坐标系绕原参考坐标系旋转和对参考坐标系平移的三个轴的方向和原点的位置(见图2.9)。如图2.10所示,当对一个向量n进行式(2.15)给出的H变换时,原向量n可以被认为是在新坐标系描述的那个向量u,即被变换了的向量u就是相对于参考坐标系描述的同一个向量n。2.7相对变换(Relativetransformation) 一般的情况下,如果我们用一个旋转和











王子****青蛙
 实名认证
实名认证
 内容提供者
内容提供者
最近下载
最新上传
浙江省宁波市2024-2025学年高三下学期4月高考模拟考试语文试题及参考答案.docx
汤成难《漂浮于万有引力中的房屋》阅读答案.docx
四川省达州市普通高中2025届第二次诊断性检测语文试卷及参考答案.docx
山西省吕梁市2025年高三下学期第二次模拟考试语文试题及参考答案.docx
山西省部分学校2024-2025学年高二下学期3月月考语文试题及参考答案.docx
山西省2025年届高考考前适应性测试(冲刺卷)语文试卷及参考答案.docx
全国各地市语文中考真题名著阅读分类汇编.docx
七年级历史下册易混易错84条.docx
湖北省2024-2025学年高一下学期4月期中联考语文试题及参考答案.docx
黑龙江省大庆市2025届高三第三次教学质量检测语文试卷及参考答案.docx




