

如果您无法下载资料,请参考说明:
1、部分资料下载需要金币,请确保您的账户上有足够的金币
2、已购买过的文档,再次下载不重复扣费
3、资料包下载后请先用软件解压,在使用对应软件打开
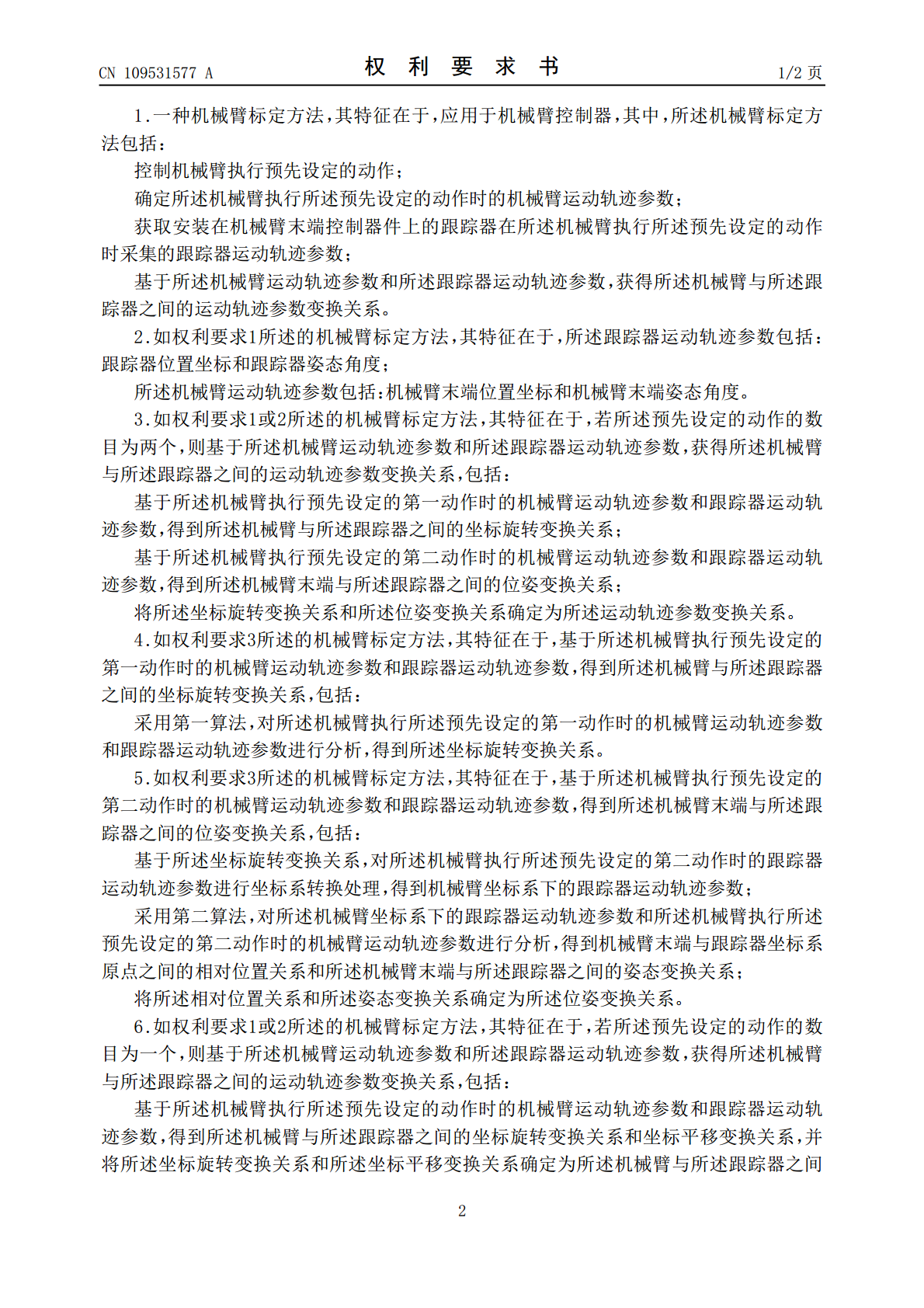
(19)中华人民共和国国家知识产权局(12)发明专利申请(10)申请公布号CN109531577A(43)申请公布日2019.03.29(21)申请号201811646363.7(22)申请日2018.12.30(71)申请人北京猎户星空科技有限公司地址100025北京市朝阳区姚家园南路一号惠通时代广场8号(72)发明人姜冠雄(74)专利代理机构北京同达信恒知识产权代理有限公司11291代理人黄志华(51)Int.Cl.B25J9/16(2006.01)权利要求书2页说明书18页附图5页(54)发明名称机械臂标定方法、装置、系统、介质、控制器及机械臂(57)摘要本发明公开了一种机械臂标定方法、装置、系统、介质、控制器及机械臂,应用于机械臂控制技术领域,用以解决现有的机械臂标定方法存在的标定步骤繁琐、标定结果不精确的问题。具体为:机械臂控制器控制机械臂执行预先设定的动作;跟踪器采集跟踪器运动轨迹参数并发送至机械臂控制器;机械臂控制器基于机械臂执行预先设定的动作时的跟踪器运动轨迹参数和机械臂运动轨迹参数,获得机械臂与跟踪器之间的运动轨迹参数变换关系。这样,通过机械臂控制器与跟踪器之间的相互协作,获得了机械臂与跟踪器之间的运动轨迹参数变换关系,实现了机械臂的自动标定,简化了人工标定的操作步骤,而且,自动标定的标定结果较为准确,误差较小。CN109531577ACN109531577A权利要求书1/2页1.一种机械臂标定方法,其特征在于,应用于机械臂控制器,其中,所述机械臂标定方法包括:控制机械臂执行预先设定的动作;确定所述机械臂执行所述预先设定的动作时的机械臂运动轨迹参数;获取安装在机械臂末端控制器件上的跟踪器在所述机械臂执行所述预先设定的动作时采集的跟踪器运动轨迹参数;基于所述机械臂运动轨迹参数和所述跟踪器运动轨迹参数,获得所述机械臂与所述跟踪器之间的运动轨迹参数变换关系。2.如权利要求1所述的机械臂标定方法,其特征在于,所述跟踪器运动轨迹参数包括:跟踪器位置坐标和跟踪器姿态角度;所述机械臂运动轨迹参数包括:机械臂末端位置坐标和机械臂末端姿态角度。3.如权利要求1或2所述的机械臂标定方法,其特征在于,若所述预先设定的动作的数目为两个,则基于所述机械臂运动轨迹参数和所述跟踪器运动轨迹参数,获得所述机械臂与所述跟踪器之间的运动轨迹参数变换关系,包括:基于所述机械臂执行预先设定的第一动作时的机械臂运动轨迹参数和跟踪器运动轨迹参数,得到所述机械臂与所述跟踪器之间的坐标旋转变换关系;基于所述机械臂执行预先设定的第二动作时的机械臂运动轨迹参数和跟踪器运动轨迹参数,得到所述机械臂末端与所述跟踪器之间的位姿变换关系;将所述坐标旋转变换关系和所述位姿变换关系确定为所述运动轨迹参数变换关系。4.如权利要求3所述的机械臂标定方法,其特征在于,基于所述机械臂执行预先设定的第一动作时的机械臂运动轨迹参数和跟踪器运动轨迹参数,得到所述机械臂与所述跟踪器之间的坐标旋转变换关系,包括:采用第一算法,对所述机械臂执行所述预先设定的第一动作时的机械臂运动轨迹参数和跟踪器运动轨迹参数进行分析,得到所述坐标旋转变换关系。5.如权利要求3所述的机械臂标定方法,其特征在于,基于所述机械臂执行预先设定的第二动作时的机械臂运动轨迹参数和跟踪器运动轨迹参数,得到所述机械臂末端与所述跟踪器之间的位姿变换关系,包括:基于所述坐标旋转变换关系,对所述机械臂执行所述预先设定的第二动作时的跟踪器运动轨迹参数进行坐标系转换处理,得到机械臂坐标系下的跟踪器运动轨迹参数;采用第二算法,对所述机械臂坐标系下的跟踪器运动轨迹参数和所述机械臂执行所述预先设定的第二动作时的机械臂运动轨迹参数进行分析,得到机械臂末端与跟踪器坐标系原点之间的相对位置关系和所述机械臂末端与所述跟踪器之间的姿态变换关系;将所述相对位置关系和所述姿态变换关系确定为所述位姿变换关系。6.如权利要求1或2所述的机械臂标定方法,其特征在于,若所述预先设定的动作的数目为一个,则基于所述机械臂运动轨迹参数和所述跟踪器运动轨迹参数,获得所述机械臂与所述跟踪器之间的运动轨迹参数变换关系,包括:基于所述机械臂执行所述预先设定的动作时的机械臂运动轨迹参数和跟踪器运动轨迹参数,得到所述机械臂与所述跟踪器之间的坐标旋转变换关系和坐标平移变换关系,并将所述坐标旋转变换关系和所述坐标平移变换关系确定为所述机械臂与所述跟踪器之间2CN109531577A权利要求书2/2页的坐标变换平移关系;基于所述坐标旋转变换关系,对所述跟踪器运动轨迹参数中的跟踪器姿态角度进行坐标系转换处理,得到机械臂坐标系下的跟踪器姿态角度,并对所述机械臂坐标系下的跟踪器姿态角度和所述机械臂运动轨迹参数中的机械臂末端姿态角度进行分析,得到机械臂末端与所述跟踪器之间的姿态变换关系;将所述











康平****ng
 实名认证
实名认证
 内容提供者
内容提供者
最近下载




