


如果您无法下载资料,请参考说明:
1、部分资料下载需要金币,请确保您的账户上有足够的金币
2、已购买过的文档,再次下载不重复扣费
3、资料包下载后请先用软件解压,在使用对应软件打开
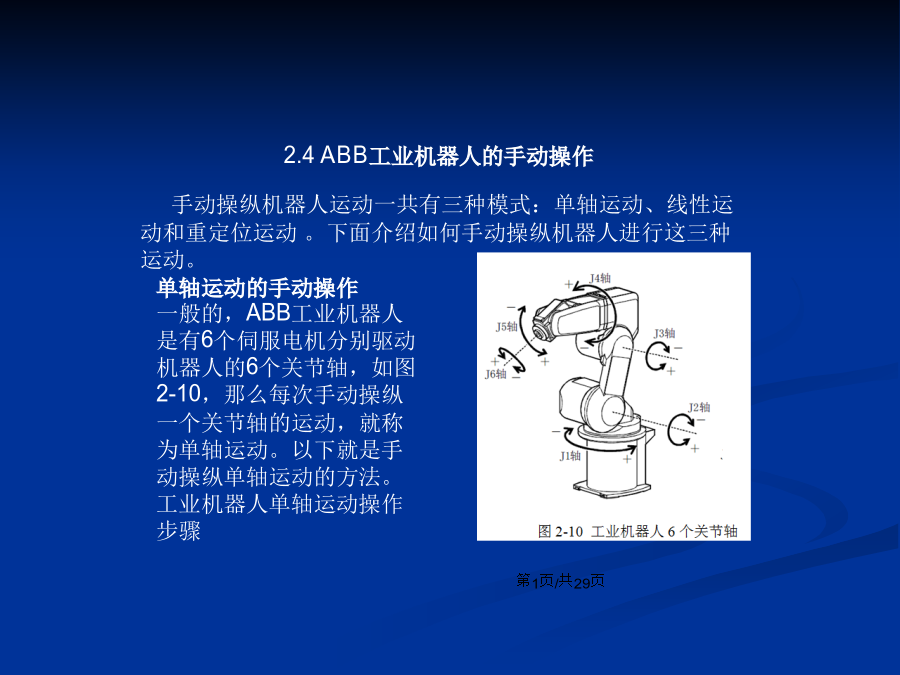
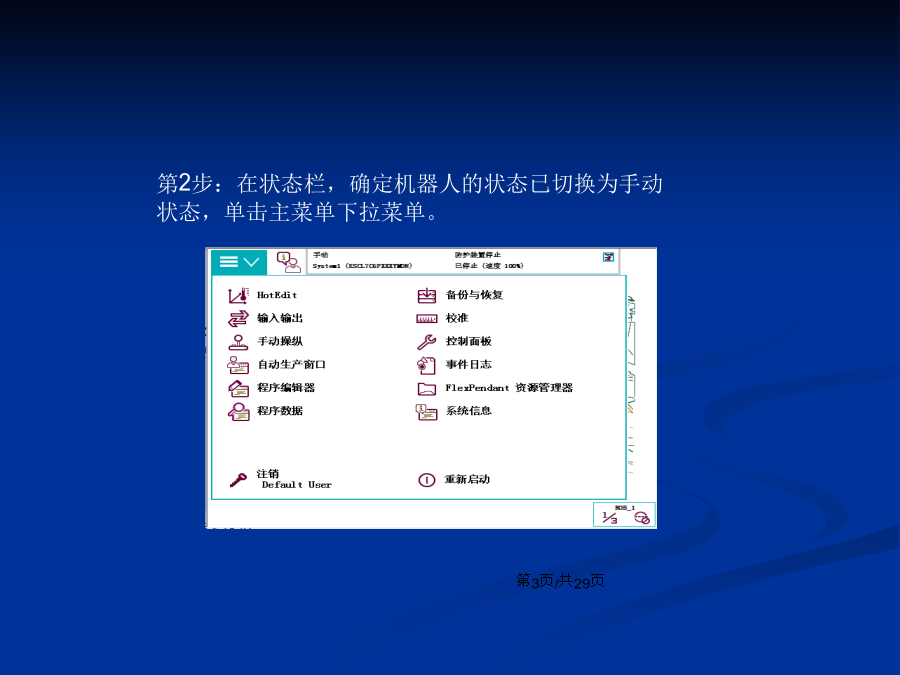
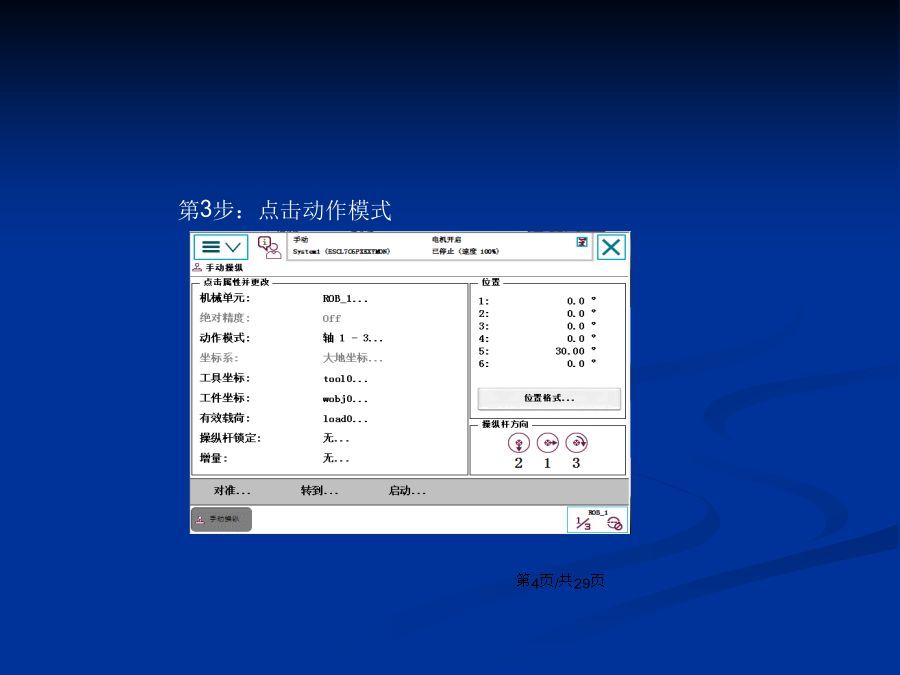
会计学2.4ABB工业机器人的手动操作工业机器人单轴运动操作步骤: 第1步:接通电源,把机器人状态钥匙切换到中间的手动限速状态第2步:在状态栏,确定机器人的状态已切换为手动 状态,单击主菜单下拉菜单。第3步:点击动作模式第4步:选中轴1-3,然后单击确定第5步:用左手按下使能按钮,进入“电机开启”状态,操作摇 杆机器人的123轴就会动作,摇杆的操作幅度越大,机器人 的动作速度越快。同样的方法,选择“轴4-6”操作摇杆机器 人的4、5、6轴就会动作。其中操作杆方向栏的箭头和数字代表各个轴的运动时的正方向线性运动的手动操作 工业机器人的线性运动是指安装在机器人第6轴法兰盘上工具的TCP在空间中作线性运动。坐标线性运动时要指定坐标系、工具坐标、工件坐标。坐标系包括大地坐标、基坐标、工具坐标、工件坐标。工具坐标指定了TCP点位置、坐标系指定了TCP点在哪个坐标系中运行。工件坐标指定TCP点在哪个工件坐标系中运行,当坐标系选择了工件坐标时,工件坐标才生效。 线性运动手动操作步骤:第1步:单击ABB主菜单下拉菜单中的手动操作第2步:点击动作模式,选择线性方式。第3步:选择工具坐标系“tool0”(这里我们用的是系统 自带的工具坐标,关于工具坐标的建立请第四章),电 机上电第4步:操作示教器上的操作杆,工具坐标TCP点在空 间做线性运动,操作杆方向栏中X、Y、Z的箭头方向 代表各个坐标轴运动的正方向。增量模式操作步骤: 第1步:在ABB主菜单下,点击增量第2步:其中增量对应位移的及角度的大小见表2-9,根据需要 选择增量模式的移动距离,然后确定。增量重定位操作 机器人的重定位运动是指机器人第6轴法兰盘上的工具TCP点在 空间中绕着坐标轴旋转的运动,也可以理解为机器人绕着工具 TCP点作姿态调整的运动。以下就是手动操纵复位位运动的方法。 复位运动操作步骤: 第1步:点击ABB菜单主菜单,选择动作模式。第2步:选中重定位,单击“确定”按钮。第3步:点击坐标系。第4步:选取工具坐标系,单击“确定”按钮。第5步:用左手按下使能按钮,进入电机开启状态,在状态 栏确定点击开启状态。第6步:操作示教器上的操作杆,机器人绕着工具TCP 点作姿态调整的运动,操作杆方向栏中X、Y、Z的箭 头方向代表各个坐标轴运动的正方向。第3步:点击坐标系。手动快捷按钮的使用 手动快捷按钮可实现机器人/外轴的切换;线性运动/复位位运动的切换;关节运动1-3轴/4-6轴的切换及增量开和关的功能,在机器人操作和编程过程中频繁使用,手动快捷按钮如图2-11所示。第1步:点击快捷菜单按钮第2步:点击机器人图标第3步:点击显示详情,可选择当前使用的工具数据, 工件坐标系,操作杆倍率,增量开/关,碰撞监控开/关, 坐标系选择及动作模式选择第4步:点击增量开关,选择需要的增量。第5步:选择用户模块,然后点击显示值,就可以进行增量值得 自定义了。











骑着****猪猪
 实名认证
实名认证
 内容提供者
内容提供者
最近下载




