

如果您无法下载资料,请参考说明:
1、部分资料下载需要金币,请确保您的账户上有足够的金币
2、已购买过的文档,再次下载不重复扣费
3、资料包下载后请先用软件解压,在使用对应软件打开
会计学如:燃料最优控制:若采用经典变分法:一、<定理>极小值原理:[时变系统]3、与2、最优控制三、几种边界条件得讨论:由横截条件:由x(0)=5代入,得例2:解得:五、极小值原理中哈密顿函数H的性质讨论2、对于时变系统:第四节最小值原理在实际中的应用一、时间最优控制问题1、问题提出(时变系统)
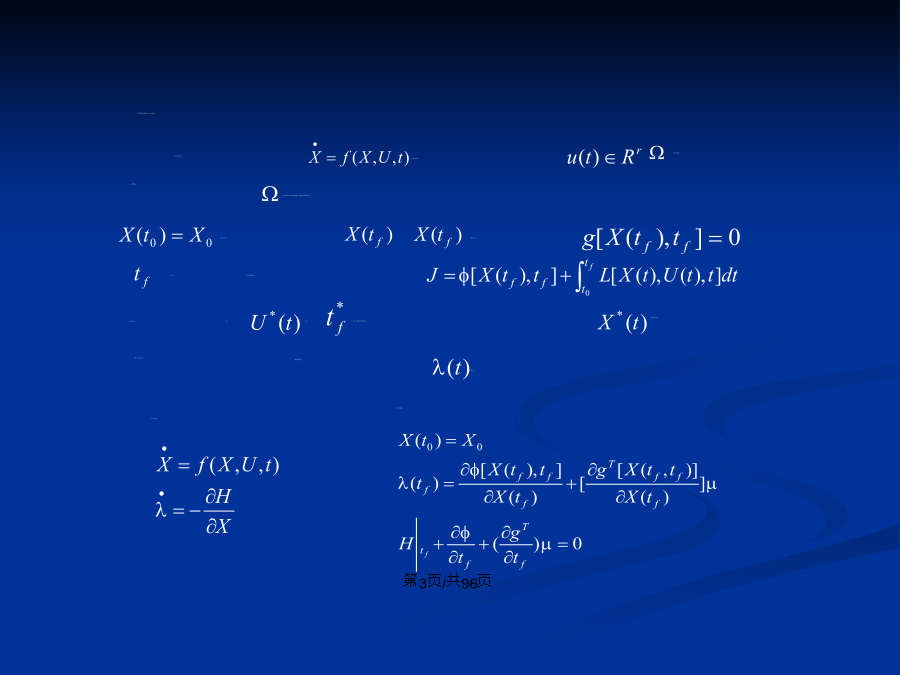
已知受控系统
并设f和B对X(t)和t连续可微。应用最小值原理进行问题的求解则有:j=1,2…r
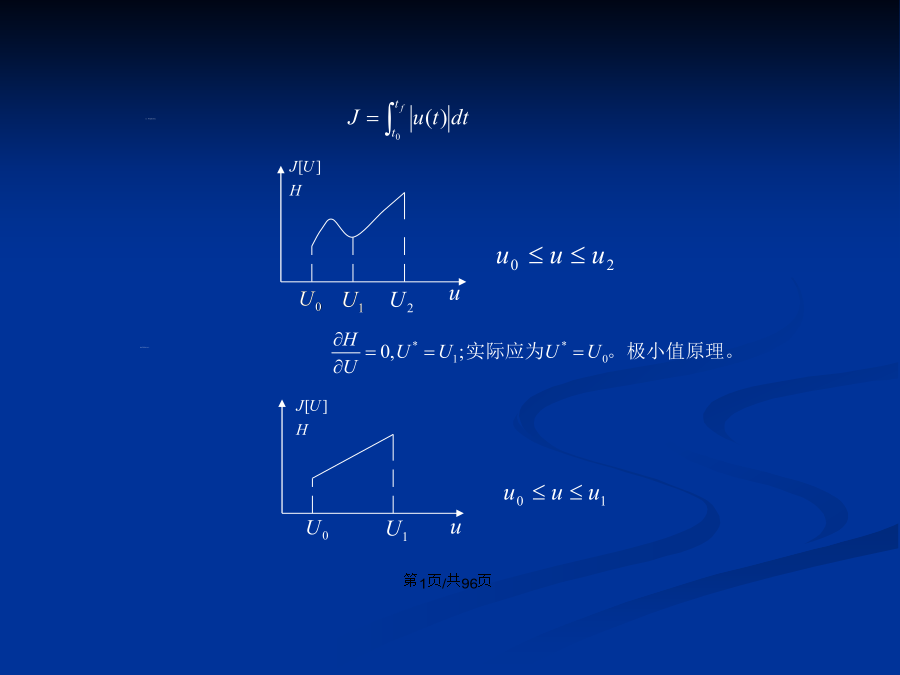
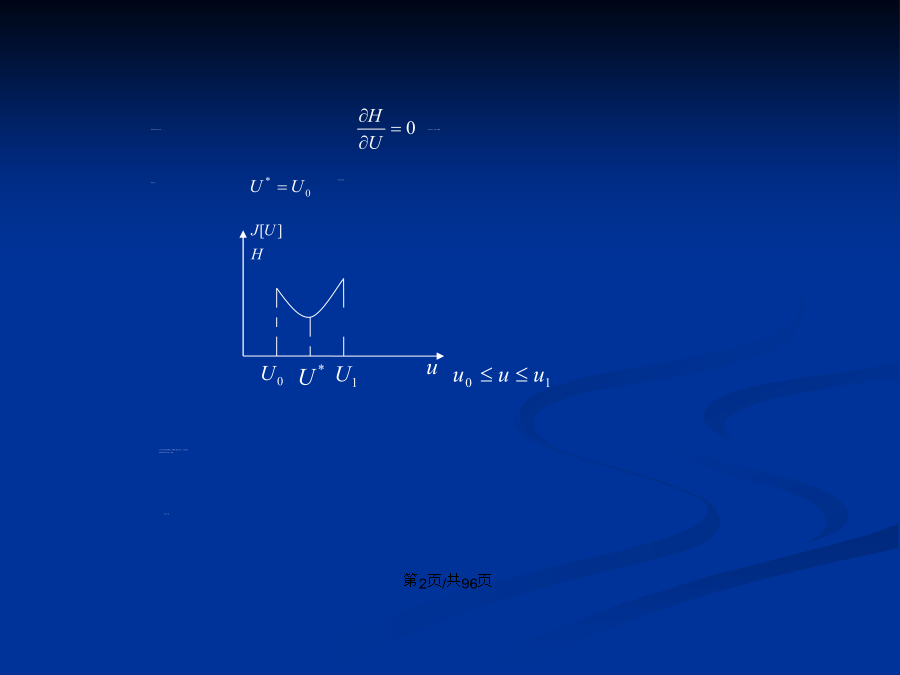
最优控制u*(t)是使为极小,则:
我们仅研究正常情况
u*(t)写成符号函数sgn{}形式
则j=1,2…r
向量形式:u*(t)=-sgn{q*(t)}
=-sgn{}
⑷求最优控制u*(t)
3、线性定常系统的最小时间控制问题的解法:⑵问题的求解代入得:⑶开关次数定理:
设线性系统是正常的(不存在非奇异问题),若矩阵A的特征值均为实数,假定时间最优控制存在,并令其为
则u*(t)的切换次数最多不超过(n-1)次,n为系统的维数。解:对象为二阶线性系统[双积分模型的时间最优控制](应用最普通最广泛的一种)由由若u=-1,则显然:若初始状态在NO或在PO上,可进一步转移到目标原点,称NOP为开关曲线因此,问题的解为:
①先以u=-1控制到达Po曲线上的B点
②以u=+1沿开关曲线Po到达原点
从初始状态到达末端状态的轨迹为AQBO,
即u*=
进而,可求出转移时间ts及最优时间
把状态轨线控制序列分成若干段,逐步算出所需时间,最后相加。
求及ts
在AQB段,u=-1,
BO段:u=+1,例题分析2:二阶积分系统的最小时间控制系统⑶确定控制序列:
显然,由⑵知,为一条直线,其形式有可能为4种⑷状态轨线:
由⑶知,u有4种可能的取值,其值为±1,代入状态方程:利用上式,消去中间变量t,可导出x1和x2的关系为:⑸确定开关曲线:使系统状态直接回到末端状态的曲线AO和BO
总的开关曲线:AOB
显然:⑹确定最优控制作用u*
u*与初始状态有关例3:升降机的快速降落问题:
设有一升降机W,它的质量为1,升降机一方面受重力g的作用,另一方面受控制器的作用力u(t)的作用,且
(M>g是常数)
设x(t)为升降机离开地面的距离,
当t=时,[离地面距离]
[垂直运动速度]
解:建立升降机系统的数学模型,F=ma
即:协状态方程:即:常数设u=-M,同理可得:
如图虚线所示
〈ⅱ〉当在曲线上时,状态沿回原点
〈ⅲ〉当时,
沿相应的虚线抛物线运动到时,
沿回到原点。对于实际问题升降机的分析:
它在地面之上,∴,处于相平面的右半部分,且设从上例可以看出:快速最优控制有如下特点:
<ⅰ>u*要么最大,要么最小。
<ⅱ>u*的取值经过有限的(n-1)次(可为最多次)数切换可到达平衡点。
<ⅲ>u*的取值仅在开管曲线上切换。二、燃料最优控制问题1、数学描述[以二阶级分模型的燃料最优控制为例]正常:仅在有限个点上
奇异:至少在一段时间[t1,t2]间隔内由:和的计标以下两个图形画出了不同初始状态转移轨线在t=tb处应满足:习题1:设系统为当t=ts时在B点应有:习题2分析:设线性状态方程为:
边界条件:当u*=+1时,箭头方向:以u=+1为例,
当X2>1时,
∴X1↑,X2↓
当X2<1时,X1↓,X2↓
所以箭头如图由于时间持续不超过,故改圆弧的长度最多等于半圆,到达A’点,发上第二段转换进而进入倒数第三段。极小值原理的证明:边界条件:下面分析开关曲线:显然,只有c=1及由于A点可为开关曲线r将相平等分为两部分所以总的控制作用:习题:已知线性定常系状态方程:注:在时间最优控制中,我们知道:<定义1>若在区间[<问题1>:已知线性时不变系统,从上述必要条件出发,可得一些有用的结论:由此:<定理2>:当且仅当另外,我们知道,一个完全能控的线性定常系统:<问题>已知线性定常系统:根据极小值原理,注意:在燃料最优控制中,区分正常情况与时间最优控制不同。首先:1)试证明系统由初态:2、二阶空间控制系统的状态方程为:解:求解最优解的必要条件:具体分析:因为有状态方程知:是一组不通过原点的平行线或轴上的孤立点分析:设若采用的控制方式为:若选用={-1,0}则系统在u=-1作用下,将状态转移到初态若不考虑转移时间,则作业1:设二阶系统方程:
其中。试确定将系统由已知初态最快地转移到
的最优控制函数作业3:给定二阶系统
控制约束:试确定使系统由已知初态最快地转移到坐标原点的最优控制作业6:系统状态方程
求时间最优控制函数,使系统由转移到终端状态,并求开关曲线,绘出图形。











骑着****猪猪
 实名认证
实名认证
 内容提供者
内容提供者
最近下载




