

如果您无法下载资料,请参考说明:
1、部分资料下载需要金币,请确保您的账户上有足够的金币
2、已购买过的文档,再次下载不重复扣费
3、资料包下载后请先用软件解压,在使用对应软件打开
(19)中华人民共和国国家知识产权局 (12)发明专利申请 (10)申请公布号CN112478108A (43)申请公布日2021.03.12 (21)申请号202011269246.0B63C11/52(2006.01) (22)申请日2020.11.13B25J11/00(2006.01) G01S15/88(2006.01) (71)申请人国网浙江省电力有限公司舟山供电G01D21/02(2006.01) 公司 地址316021浙江省舟山市定海临城街道 定沈路669号 申请人浙江舟山海洋输电研究院有限公司 国网浙江省电力有限公司 (72)发明人胡凯陈国东张磊乐彦杰 陆丽君彭维龙何旭涛张引贤 (74)专利代理机构浙江翔隆专利事务所(普通 合伙)33206 代理人王晓燕 (51)Int.Cl. B63C11/34(2006.01) 权利要求书2页说明书4页附图2页 (54)发明名称 一种海底电缆机器人排除海底电缆障碍物 的方法 (57)摘要 本发明公开了一种有缆水下机器人排除海 底海缆障碍物的方法,涉及海底海缆运行维护领 域。目前,水下机器人仅用于对海底海缆的勘察, 对可能造成海底海缆的障碍物并不采取措施,功 能简单。本发明包括步骤:当海底海缆周边有威 胁海缆安全的异物时,利用光学设备和/或声学 设备对异常点近观检测、摄影、记录坐标;利用有 缆水下机器人携带的工具,包括机械手、剪切器, 对小型障碍物拆除作业;对大型障碍物,有缆水 下机器人通过机械手将障碍物连接在障碍物清 除工作船释放的绳索上,由船上起重设备将障碍 物拉出。本技术方案设机械手、剪切器,代替潜水 员完成海底海缆障碍物清除作业,提高了海底海 缆运维检修的效率,减少了工作人员排障作业安 全风险。 CN112478108A CN112478108A权利要求书1/2页 1.一种有缆水下机器人排除海底海缆障碍物的方法,其特征在于包括以下步骤: 1)工作船搭载有缆水下机器人系统到达指定海域;有缆水下机器人系统包括有缆水 下机器人和操控系统;所述的操控系统与有缆水下机器人之间通过脐带缆(7)相连; 2)有缆水下机器人系统检查完毕后,有缆水下机器人入水缓慢下潜; 3)根据预先设定的海底海缆(6)路由图,结合工作船导航装置和有缆水下机器人水下 定位装置,让有缆水下机器人驶至巡检作业点附近位置; 4)有缆水下机器人打开电磁感应探测仪器(10),以向前搜索模式搜寻海缆(6),当搜 寻到海缆(6)后,有缆水下机器人根据工作船上的操控系统提供的方位、夹角改变其方位, 使电磁感应探测仪器(10)的两组线圈处于被测海缆(6)上方; 5)当电磁感应探测仪器(10)两组线圈处于被测海缆(6)上方后,将前向搜索模式改为 跟踪模式,从而跟踪海缆(6); 6)巡检作业时有缆水下机器人悬浮于海底海缆(6)的正上方,并离开海床设定高度; 7)操控系统根据预先设定的海缆(6)路由图及电磁感应探测仪器(10)的指示,控制有 缆水下机器人沿海底海缆(6)巡航; 8)有缆水下机器人沿海底海缆(6)路由巡检时,工作船跟随有缆水下机器人航行,船 的螺旋桨和侧推器始终连续运转,防止有缆水下机器人的脐带缆(7)被绞入螺旋桨中,同时 脐带缆(7)每间隔一定距离可配置重物,以减少脐带缆(7)受推力或浮力的影响; 9)有缆水下机器人作业时前进速度小于2kn,前进速度根据水下能见度和设备采样 率,调整前进速度以达到最佳探测效果; 10)操控系统根据有缆水下机器人反馈的声纳和光学设备信息,配合照明设备,监视 海缆(6)本体情况,检查海缆(6)路由周边障碍物分布; 11)当海底海缆(6)周边有威胁海缆(6)安全的异物时,控制有缆水下机器人停止前 进,利用光学设备和/或声学设备对异常点近观检测、摄影、记录坐标;利用有缆水下机器人 携带的工具,包括机械手(5)、剪切器,对小型障碍物拆除作业;对大型障碍物,有缆水下机 器人通过机械手(5)将障碍物连接在障碍物清除工作船释放的绳索上,由船上起重设备将 障碍物拉出; 12)有缆水下机器人巡航检测时对海缆(6)路由和深度进行记录,并在导航系统中记 录有缆水下机器人坐标轨迹; 13)工作完毕后,将有缆水下机器人回收到甲板;检查有缆水下机器人本体及附件是 否完好,并用淡水冲洗,避光保存。 2.根据权利要求1所述的一种有缆水下机器人排除海底海缆障碍物的方法,其特征在 于:所述的电磁感应探测仪器(10)包括发信机、探测单元、数据处理装置;发信机向海缆(6) 注入正弦波电源信号,探测单元包括多个探头,分别测量海缆(6)周围的电磁场信号强度和 方向;数据处理装置内置于水下机器人密封舱内,完成水下探测单元测得信号的分析处理, 通过探头与海缆(6)路由的角度、距离信息,计算海缆(6)的埋深和位置,并将
Ta的资源
2020110359336低致栓颅内血管编织支架及其处理方法
2020110303186一种钙钛矿量子点聚合物粒子的制备方法
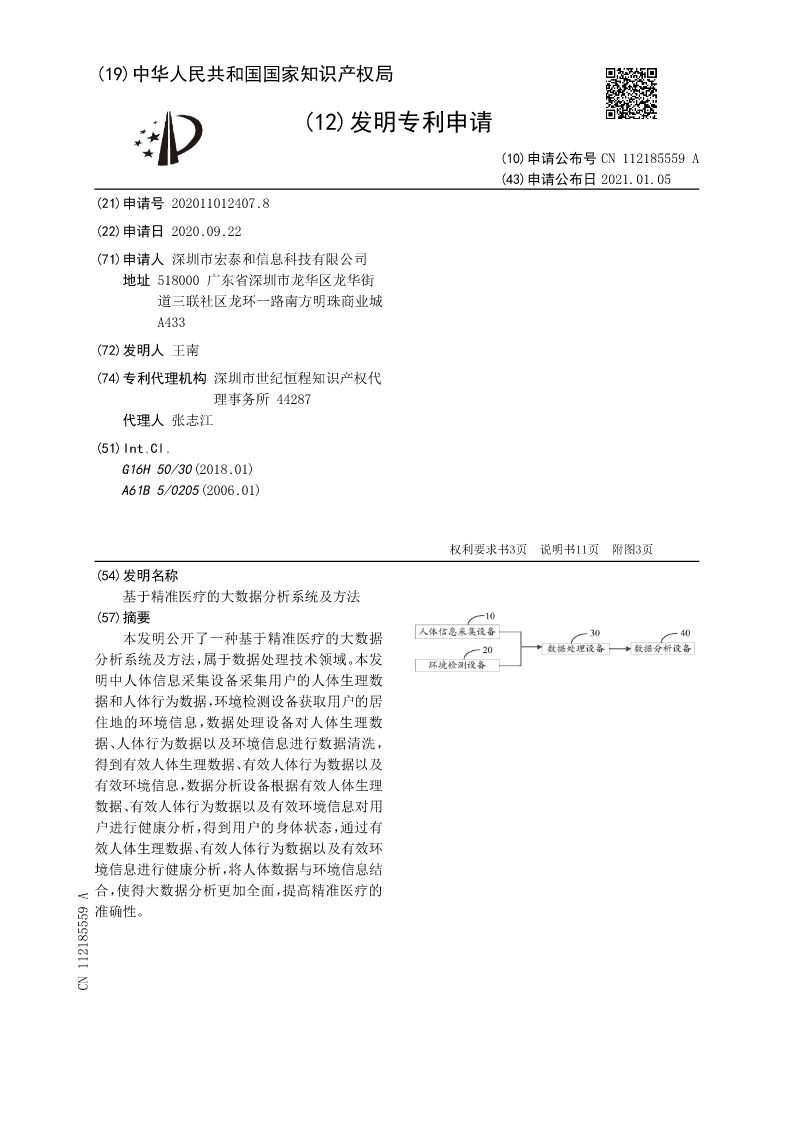
2020110124078基于精准医疗的大数据分析系统及方法
2020109651910 应用近红外谷物分析仪建立油莎豆中粗脂肪含量的检测方法
2020109529321一种铝合金用无氟无氯环保粒状精炼剂及其制备和应用
2020108899336一种新能源商用车总装车间线路布局
2020108620703城市燃气管网多输差协同计算模型及应用方法
2020108207369一种微交联阳离子型聚丙烯酰胺絮凝剂及其制备方法与应用
2020108035131一种基于全站仪的激光雷达外部参数标定方法
2020107682859一种内燃机等离子节油器阴阳极的制备方法

13****40
 实名认证
实名认证
 内容提供者
内容提供者
最近下载




