

如果您无法下载资料,请参考说明:
1、部分资料下载需要金币,请确保您的账户上有足够的金币
2、已购买过的文档,再次下载不重复扣费
3、资料包下载后请先用软件解压,在使用对应软件打开
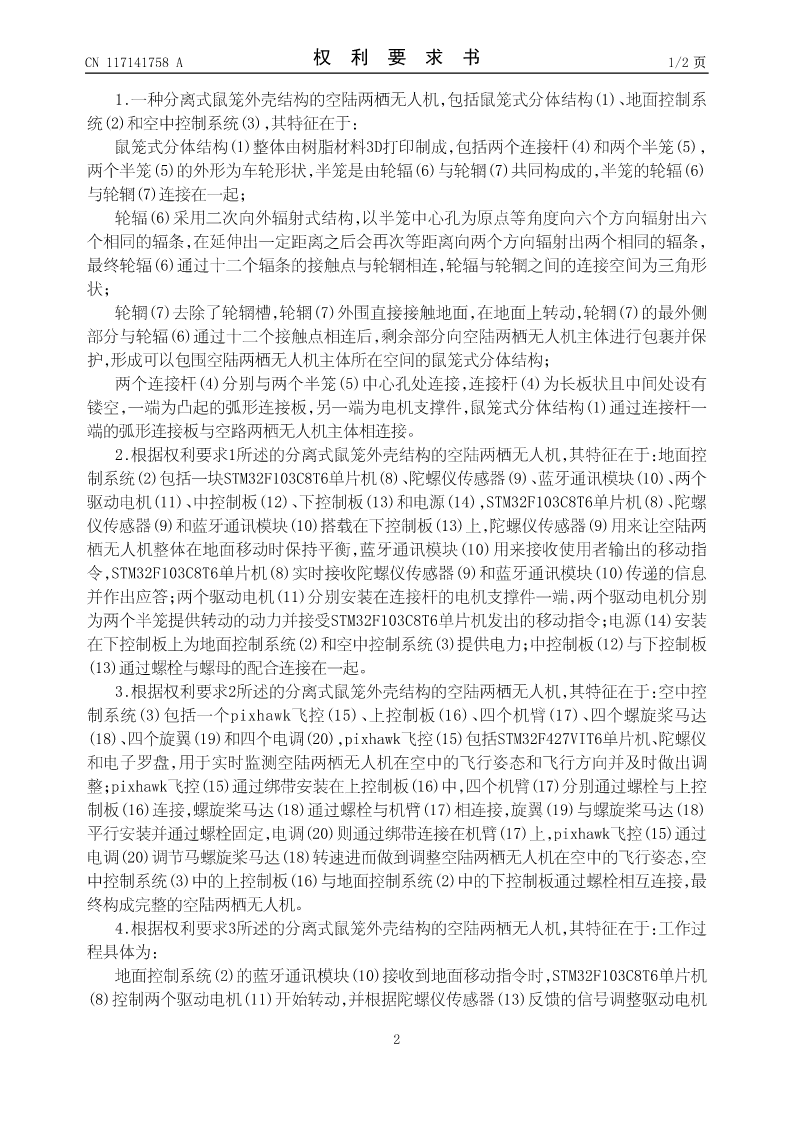
(19)国家知识产权局 (12)发明专利申请 (10)申请公布号CN117141758A (43)申请公布日2023.12.01 (21)申请号202311233382.8B60B19/00(2006.01) (22)申请日2023.09.22B62D61/00(2006.01) (71)申请人南京理工大学 地址210094江苏省南京市玄武区孝陵卫 200号 (72)发明人陈骥春杨国来王修业卢旭鑫 吕枞孙昊胡小雨容玥 仲宇杨 (74)专利代理机构南京理工大学专利中心 32203 专利代理师封睿 (51)Int.Cl. B64U10/70(2023.01) B64U20/75(2023.01) B60F5/02(2006.01) 权利要求书2页说明书6页附图4页 (54)发明名称 分离式鼠笼外壳结构的空陆两栖无人机 (57)摘要 本发明提供了一种分离式鼠笼外壳结构的 空陆两栖无人机,包括鼠笼式分体结构、地面控 制系统和空中控制系统,鼠笼式分体结构包括两 个连接杆和两个半笼,两个连接杆与两个半笼分 别通过螺栓与螺母的配合连接形成鼠笼式分体 结构,两个半笼为车轮状,在地面上移动时可以 通过两个半笼的差速转动进行灵活地转动与避 障。地面控制系统和空中控制系统采用螺栓与控 制板连接形成整体,进而与鼠笼式分体结构中的 连接杆部分连接形成空路两栖无人。本发明空陆 两栖无人机在陆地移动更加灵活,越障能力更 强。 CN117141758A CN117141758A权利要求书1/2页 1.一种分离式鼠笼外壳结构的空陆两栖无人机,包括鼠笼式分体结构(1)、地面控制系 统(2)和空中控制系统(3),其特征在于: 鼠笼式分体结构(1)整体由树脂材料3D打印制成,包括两个连接杆(4)和两个半笼(5), 两个半笼(5)的外形为车轮形状,半笼是由轮辐(6)与轮辋(7)共同构成的,半笼的轮辐(6) 与轮辋(7)连接在一起; 轮辐(6)采用二次向外辐射式结构,以半笼中心孔为原点等角度向六个方向辐射出六 个相同的辐条,在延伸出一定距离之后会再次等距离向两个方向辐射出两个相同的辐条, 最终轮辐(6)通过十二个辐条的接触点与轮辋相连,轮辐与轮辋之间的连接空间为三角形 状; 轮辋(7)去除了轮辋槽,轮辋(7)外围直接接触地面,在地面上转动,轮辋(7)的最外侧 部分与轮辐(6)通过十二个接触点相连后,剩余部分向空陆两栖无人机主体进行包裹并保 护,形成可以包围空陆两栖无人机主体所在空间的鼠笼式分体结构; 两个连接杆(4)分别与两个半笼(5)中心孔处连接,连接杆(4)为长板状且中间处设有 镂空,一端为凸起的弧形连接板,另一端为电机支撑件,鼠笼式分体结构(1)通过连接杆一 端的弧形连接板与空路两栖无人机主体相连接。 2.根据权利要求1所述的分离式鼠笼外壳结构的空陆两栖无人机,其特征在于:地面控 制系统(2)包括一块STM32F103C8T6单片机(8)、陀螺仪传感器(9)、蓝牙通讯模块(10)、两个 驱动电机(11)、中控制板(12)、下控制板(13)和电源(14),STM32F103C8T6单片机(8)、陀螺 仪传感器(9)和蓝牙通讯模块(10)搭载在下控制板(13)上,陀螺仪传感器(9)用来让空陆两 栖无人机整体在地面移动时保持平衡,蓝牙通讯模块(10)用来接收使用者输出的移动指 令,STM32F103C8T6单片机(8)实时接收陀螺仪传感器(9)和蓝牙通讯模块(10)传递的信息 并作出应答;两个驱动电机(11)分别安装在连接杆的电机支撑件一端,两个驱动电机分别 为两个半笼提供转动的动力并接受STM32F103C8T6单片机发出的移动指令;电源(14)安装 在下控制板上为地面控制系统(2)和空中控制系统(3)提供电力;中控制板(12)与下控制板 (13)通过螺栓与螺母的配合连接在一起。 3.根据权利要求2所述的分离式鼠笼外壳结构的空陆两栖无人机,其特征在于:空中控 制系统(3)包括一个pixhawk飞控(15)、上控制板(16)、四个机臂(17)、四个螺旋桨马达 (18)、四个旋翼(19)和四个电调(20),pixhawk飞控(15)包括STM32F427VIT6单片机、陀螺仪 和电子罗盘,用于实时监测空陆两栖无人机在空中的飞行姿态和飞行方向并及时做出调 整;pixhawk飞控(15)通过绑带安装在上控制板(16)中,四个机臂(17)分别通过螺栓与上控 制板(16)连接,螺旋桨马达(18)通过螺栓与机臂(17)相连接,旋翼(19)与螺旋桨马达(18) 平行安装并通过螺栓固定,电调(20)则通过绑带连接在机臂(17)上,pixhawk飞控(15)通过 电调(20)调节马螺旋桨马达(18)转速进而做到调整空陆两栖无人机在空中的飞行姿态,空 中控制系统(3)中的上控制板
Ta的资源
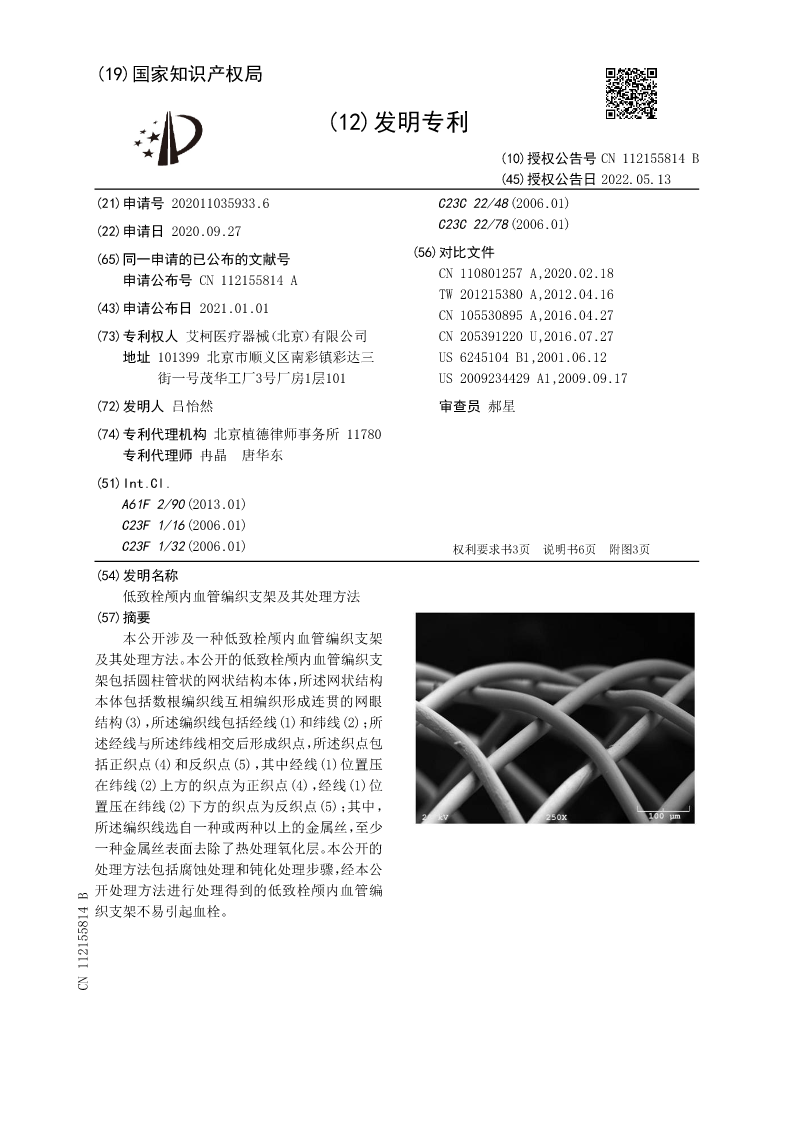
2020110359336低致栓颅内血管编织支架及其处理方法
2020110303186一种钙钛矿量子点聚合物粒子的制备方法
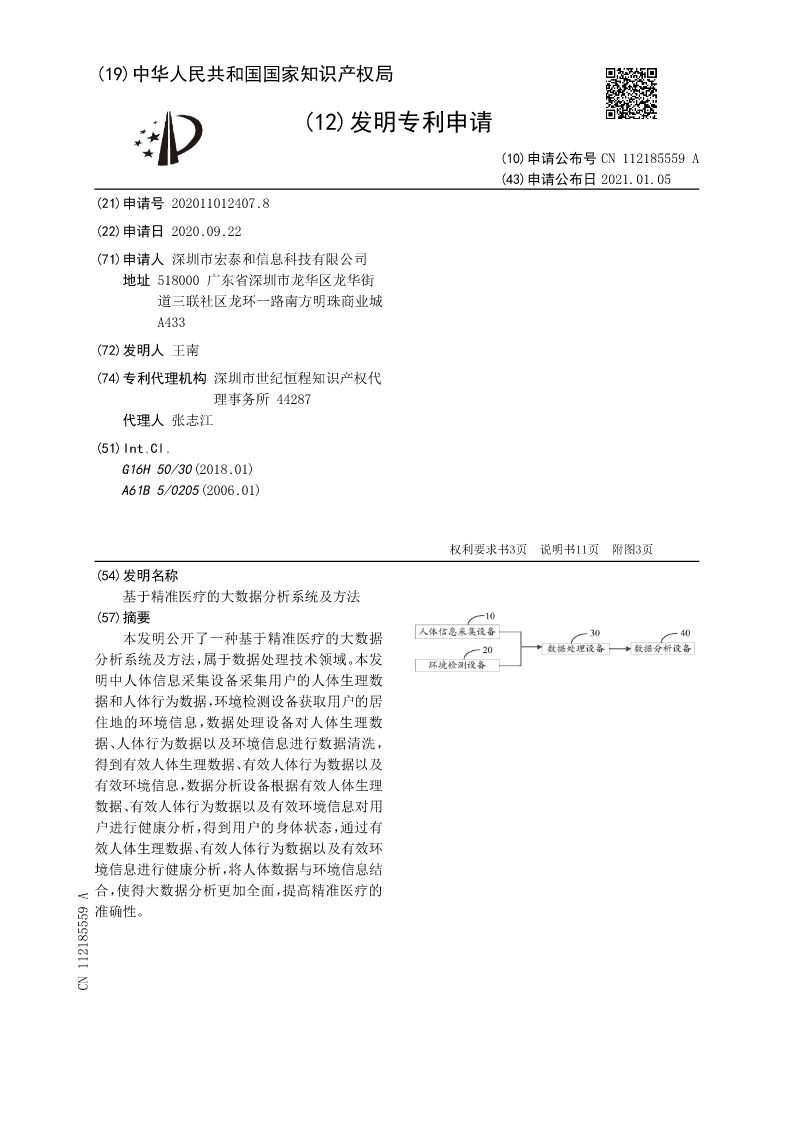
2020110124078基于精准医疗的大数据分析系统及方法
2020109651910 应用近红外谷物分析仪建立油莎豆中粗脂肪含量的检测方法
2020109529321一种铝合金用无氟无氯环保粒状精炼剂及其制备和应用
2020108899336一种新能源商用车总装车间线路布局
2020108620703城市燃气管网多输差协同计算模型及应用方法
2020108207369一种微交联阳离子型聚丙烯酰胺絮凝剂及其制备方法与应用
2020108035131一种基于全站仪的激光雷达外部参数标定方法
2020107682859一种内燃机等离子节油器阴阳极的制备方法

13****40
 实名认证
实名认证
 内容提供者
内容提供者
最近下载




