

如果您无法下载资料,请参考说明:
1、部分资料下载需要金币,请确保您的账户上有足够的金币
2、已购买过的文档,再次下载不重复扣费
3、资料包下载后请先用软件解压,在使用对应软件打开
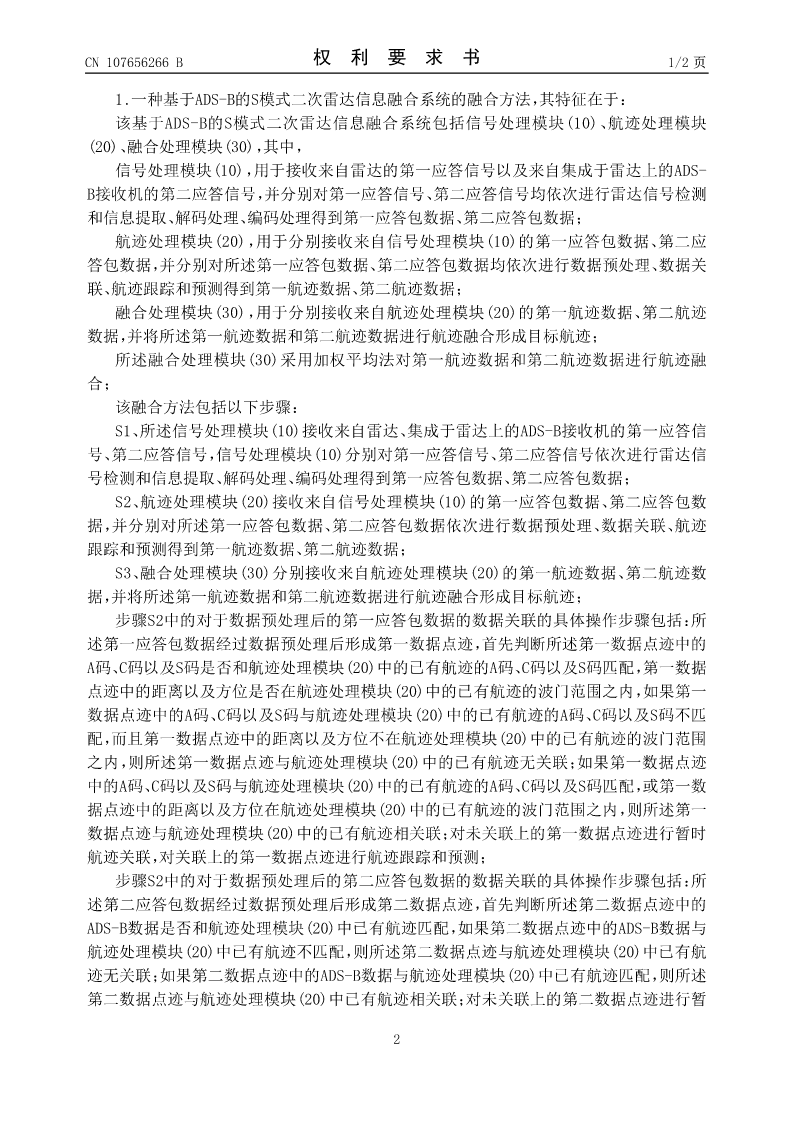
(19)中华人民共和国国家知识产权局 (12)发明专利 (10)授权公告号CN107656266B (45)授权公告日2020.03.17 (21)申请号201710754063.X(56)对比文件 (22)申请日2017.08.29CN204348094U,2015.05.20, CN106875757A,2017.06.20, (65)同一申请的已公布的文献号CN104504939A,2015.04.08, 申请公布号CN107656266ACN104992575A,2015.10.21, (43)申请公布日2018.02.02CN105894862A,2016.08.24, (73)专利权人安徽四创电子股份有限公司审查员王琳琳 地址230088安徽省合肥市高新技术产业 开发区香樟大道199号 (72)发明人梅申合 (74)专利代理机构合肥和瑞知识产权代理事务 所(普通合伙)34118 代理人王挺 (51)Int.Cl. G01S13/74(2006.01) 权利要求书2页说明书5页附图1页 (54)发明名称 基于ADS-B的S模式二次雷达信息融合系统 及其融合方法 (57)摘要 本发明属于空中交通管制监视领域,特别涉 及一种基于ADS-B的S模式二次雷达信息融合系 统及其融合方法。本发明包括信号处理模块、航 迹处理模块、融合处理模块,信号处理模块的输 入端分别接收来自雷达、集成于雷达上的ADS-B 接收机的第一应答信号、第二应答信号,信号处 理模块的输出端连接航迹处理模块的输入端,所 述航迹处理模块的输出端连接融合处理模块的 输入端,所述融合处理模块进行航迹融合形成目 标航迹。本发明充分利用ADS-B数据信息的准确 性,为雷达覆盖区域的数据信息作为补充,大大 地提高了监视系统的可用性和跟踪精度,扩大了 监视范围,有助于间隔调度,有助于飞机在整个 飞行过程中进行无间断的可靠监视。 CN107656266B CN107656266B权利要求书1/2页 1.一种基于ADS-B的S模式二次雷达信息融合系统的融合方法,其特征在于: 该基于ADS-B的S模式二次雷达信息融合系统包括信号处理模块(10)、航迹处理模块 (20)、融合处理模块(30),其中, 信号处理模块(10),用于接收来自雷达的第一应答信号以及来自集成于雷达上的ADS- B接收机的第二应答信号,并分别对第一应答信号、第二应答信号均依次进行雷达信号检测 和信息提取、解码处理、编码处理得到第一应答包数据、第二应答包数据; 航迹处理模块(20),用于分别接收来自信号处理模块(10)的第一应答包数据、第二应 答包数据,并分别对所述第一应答包数据、第二应答包数据均依次进行数据预处理、数据关 联、航迹跟踪和预测得到第一航迹数据、第二航迹数据; 融合处理模块(30),用于分别接收来自航迹处理模块(20)的第一航迹数据、第二航迹 数据,并将所述第一航迹数据和第二航迹数据进行航迹融合形成目标航迹; 所述融合处理模块(30)采用加权平均法对第一航迹数据和第二航迹数据进行航迹融 合; 该融合方法包括以下步骤: S1、所述信号处理模块(10)接收来自雷达、集成于雷达上的ADS-B接收机的第一应答信 号、第二应答信号,信号处理模块(10)分别对第一应答信号、第二应答信号依次进行雷达信 号检测和信息提取、解码处理、编码处理得到第一应答包数据、第二应答包数据; S2、航迹处理模块(20)接收来自信号处理模块(10)的第一应答包数据、第二应答包数 据,并分别对所述第一应答包数据、第二应答包数据依次进行数据预处理、数据关联、航迹 跟踪和预测得到第一航迹数据、第二航迹数据; S3、融合处理模块(30)分别接收来自航迹处理模块(20)的第一航迹数据、第二航迹数 据,并将所述第一航迹数据和第二航迹数据进行航迹融合形成目标航迹; 步骤S2中的对于数据预处理后的第一应答包数据的数据关联的具体操作步骤包括:所 述第一应答包数据经过数据预处理后形成第一数据点迹,首先判断所述第一数据点迹中的 A码、C码以及S码是否和航迹处理模块(20)中的已有航迹的A码、C码以及S码匹配,第一数据 点迹中的距离以及方位是否在航迹处理模块(20)中的已有航迹的波门范围之内,如果第一 数据点迹中的A码、C码以及S码与航迹处理模块(20)中的已有航迹的A码、C码以及S码不匹 配,而且第一数据点迹中的距离以及方位不在航迹处理模块(20)中的已有航迹的波门范围 之内,则所述第一数据点迹与航迹处理模块(20)中的已有航迹无关联;如果第一数据点迹 中的A码、C码以及S码与航迹处理模块(20)中的已有航迹的A码、C码以及S码匹配,或第一数 据点迹中的距离以及方位在航迹处理模块(20)中的已有航迹的波门范围之内,则所述第一 数据点迹与航迹
Ta的资源
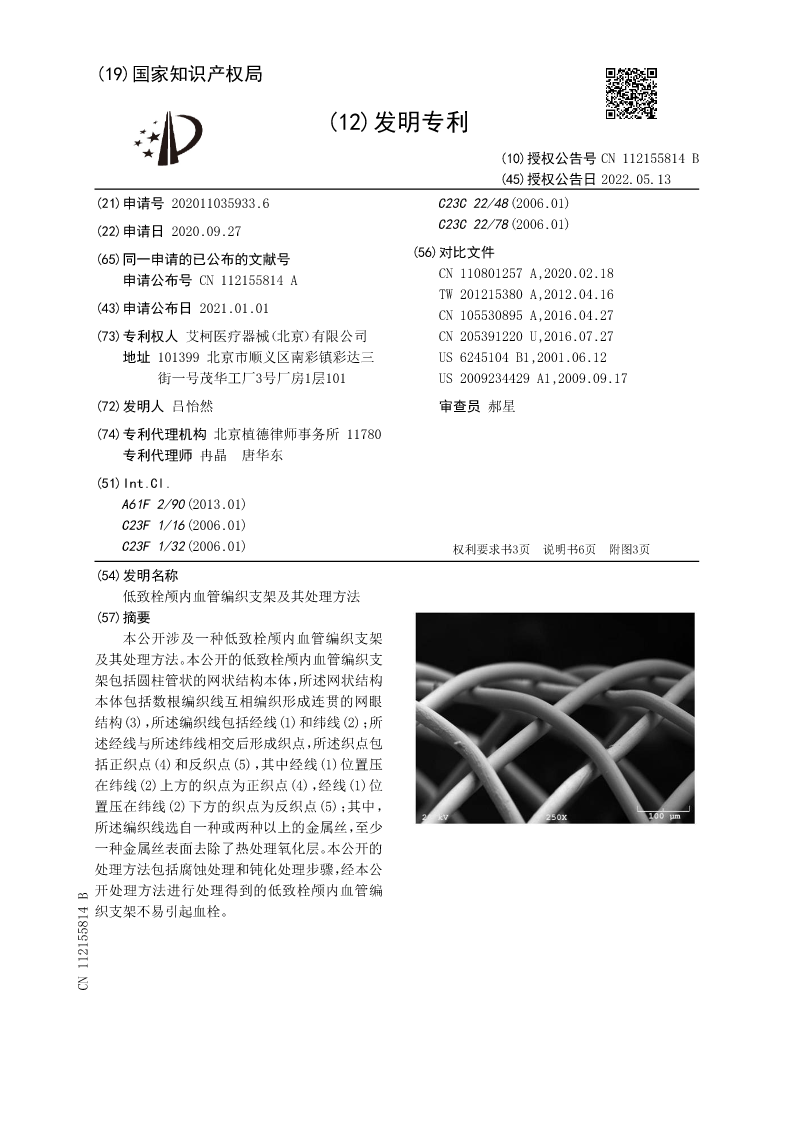
2020110359336低致栓颅内血管编织支架及其处理方法
2020110303186一种钙钛矿量子点聚合物粒子的制备方法
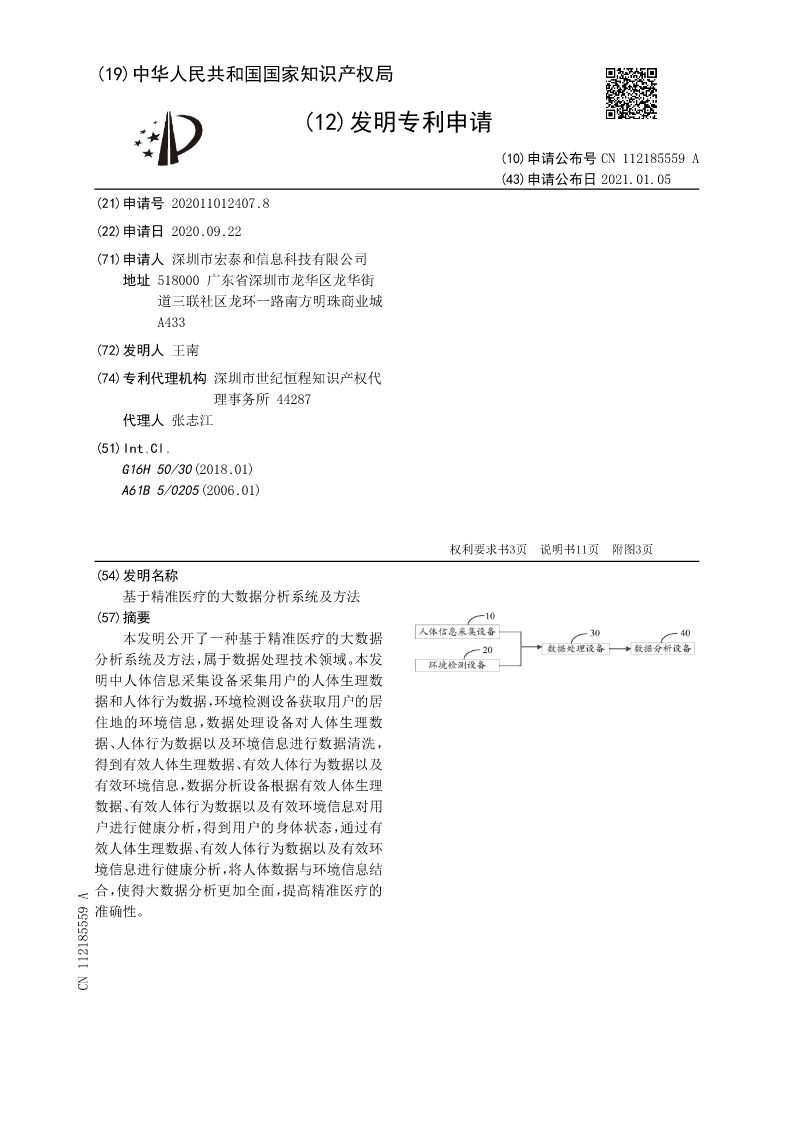
2020110124078基于精准医疗的大数据分析系统及方法
2020109651910 应用近红外谷物分析仪建立油莎豆中粗脂肪含量的检测方法
2020109529321一种铝合金用无氟无氯环保粒状精炼剂及其制备和应用
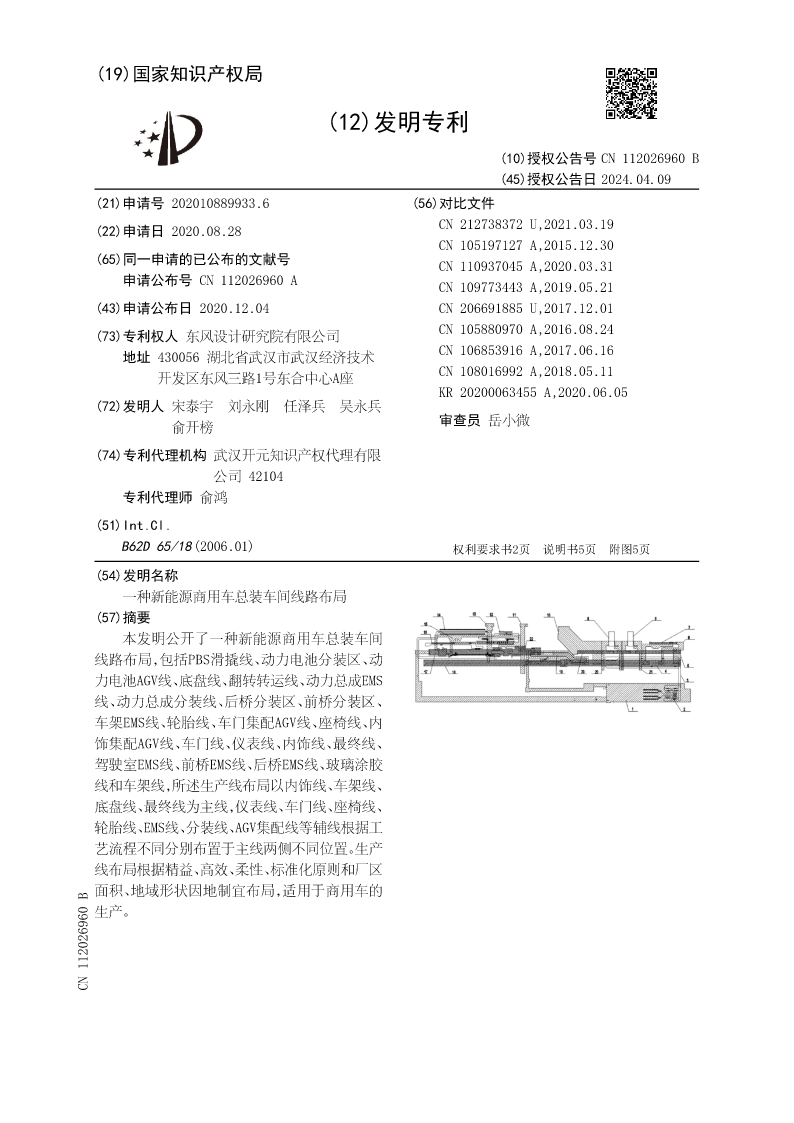
2020108899336一种新能源商用车总装车间线路布局
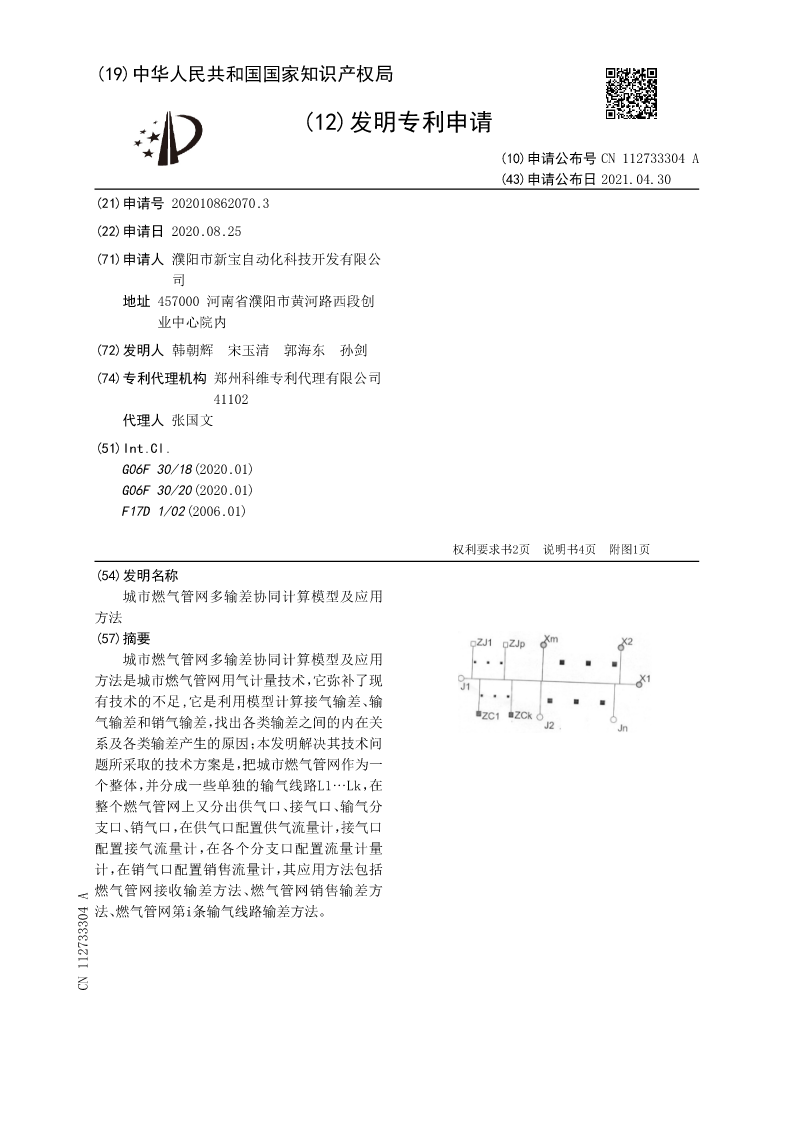
2020108620703城市燃气管网多输差协同计算模型及应用方法
2020108207369一种微交联阳离子型聚丙烯酰胺絮凝剂及其制备方法与应用
2020108035131一种基于全站仪的激光雷达外部参数标定方法
2020107682859一种内燃机等离子节油器阴阳极的制备方法

13****40
 实名认证
实名认证
 内容提供者
内容提供者
最近下载




