


如果您无法下载资料,请参考说明:
1、部分资料下载需要金币,请确保您的账户上有足够的金币
2、已购买过的文档,再次下载不重复扣费
3、资料包下载后请先用软件解压,在使用对应软件打开
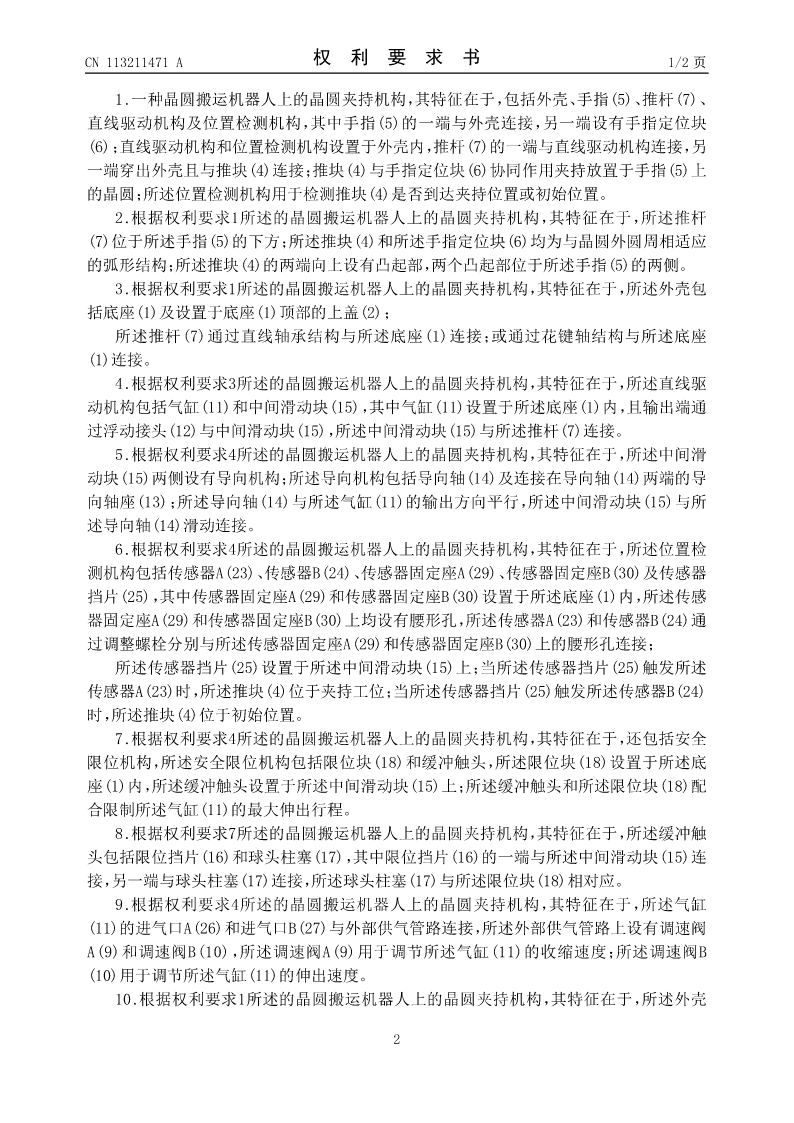
(19)中华人民共和国国家知识产权局 (12)发明专利申请 (10)申请公布号CN113211471A (43)申请公布日2021.08.06 (21)申请号202110489366.X (22)申请日2021.04.29 (71)申请人沈阳芯源微电子设备股份有限公司 地址110168辽宁省沈阳市浑南区飞云路 16号 (72)发明人吴天尧李舒驰 (74)专利代理机构沈阳科苑专利商标代理有限 公司21002 代理人何丽英 (51)Int.Cl. B25J15/00(2006.01) 权利要求书2页说明书4页附图3页 (54)发明名称 一种晶圆搬运机器人上的晶圆夹持机构 (57)摘要 本发明属于电子半导体技术领域,特别涉及 一种晶圆搬运机器人上的晶圆夹持机构。包括外 壳、手指、推杆、直线驱动机构及位置检测机构, 其中手指的一端与外壳连接,另一端设有手指定 位块;直线驱动机构和位置检测机构设置于外壳 内,推杆的一端与直线驱动机构连接,另一端穿 出外壳且与推块连接;推块与手指定位块协同作 用夹持放置于手指上的晶圆;位置检测机构用于 检测推块是否到达夹持位置或初始位置。本发明 可根据晶圆自身的强度调节夹持机构的夹持力 度,同时调节夹持速度使夹持过程不对晶圆造成 损伤。 CN113211471A CN113211471A权利要求书1/2页 1.一种晶圆搬运机器人上的晶圆夹持机构,其特征在于,包括外壳、手指(5)、推杆(7)、 直线驱动机构及位置检测机构,其中手指(5)的一端与外壳连接,另一端设有手指定位块 (6);直线驱动机构和位置检测机构设置于外壳内,推杆(7)的一端与直线驱动机构连接,另 一端穿出外壳且与推块(4)连接;推块(4)与手指定位块(6)协同作用夹持放置于手指(5)上 的晶圆;所述位置检测机构用于检测推块(4)是否到达夹持位置或初始位置。 2.根据权利要求1所述的晶圆搬运机器人上的晶圆夹持机构,其特征在于,所述推杆 (7)位于所述手指(5)的下方;所述推块(4)和所述手指定位块(6)均为与晶圆外圆周相适应 的弧形结构;所述推块(4)的两端向上设有凸起部,两个凸起部位于所述手指(5)的两侧。 3.根据权利要求1所述的晶圆搬运机器人上的晶圆夹持机构,其特征在于,所述外壳包 括底座(1)及设置于底座(1)顶部的上盖(2); 所述推杆(7)通过直线轴承结构与所述底座(1)连接;或通过花键轴结构与所述底座 (1)连接。 4.根据权利要求3所述的晶圆搬运机器人上的晶圆夹持机构,其特征在于,所述直线驱 动机构包括气缸(11)和中间滑动块(15),其中气缸(11)设置于所述底座(1)内,且输出端通 过浮动接头(12)与中间滑动块(15),所述中间滑动块(15)与所述推杆(7)连接。 5.根据权利要求4所述的晶圆搬运机器人上的晶圆夹持机构,其特征在于,所述中间滑 动块(15)两侧设有导向机构;所述导向机构包括导向轴(14)及连接在导向轴(14)两端的导 向轴座(13);所述导向轴(14)与所述气缸(11)的输出方向平行,所述中间滑动块(15)与所 述导向轴(14)滑动连接。 6.根据权利要求4所述的晶圆搬运机器人上的晶圆夹持机构,其特征在于,所述位置检 测机构包括传感器A(23)、传感器B(24)、传感器固定座A(29)、传感器固定座B(30)及传感器 挡片(25),其中传感器固定座A(29)和传感器固定座B(30)设置于所述底座(1)内,所述传感 器固定座A(29)和传感器固定座B(30)上均设有腰形孔,所述传感器A(23)和传感器B(24)通 过调整螺栓分别与所述传感器固定座A(29)和传感器固定座B(30)上的腰形孔连接; 所述传感器挡片(25)设置于所述中间滑动块(15)上;当所述传感器挡片(25)触发所述 传感器A(23)时,所述推块(4)位于夹持工位;当所述传感器挡片(25)触发所述传感器B(24) 时,所述推块(4)位于初始位置。 7.根据权利要求4所述的晶圆搬运机器人上的晶圆夹持机构,其特征在于,还包括安全 限位机构,所述安全限位机构包括限位块(18)和缓冲触头,所述限位块(18)设置于所述底 座(1)内,所述缓冲触头设置于所述中间滑动块(15)上;所述缓冲触头和所述限位块(18)配 合限制所述气缸(11)的最大伸出行程。 8.根据权利要求7所述的晶圆搬运机器人上的晶圆夹持机构,其特征在于,所述缓冲触 头包括限位挡片(16)和球头柱塞(17),其中限位挡片(16)的一端与所述中间滑动块(15)连 接,另一端与球头柱塞(17)连接,所述球头柱塞(17)与所述限位块(18)相对应。 9.根据权利要求4所述的晶圆搬运机器人上的晶圆夹持机构,其特征在于,所述气缸 (11)的进气口A(26)和进气口B(27)与外部供气管
Ta的资源
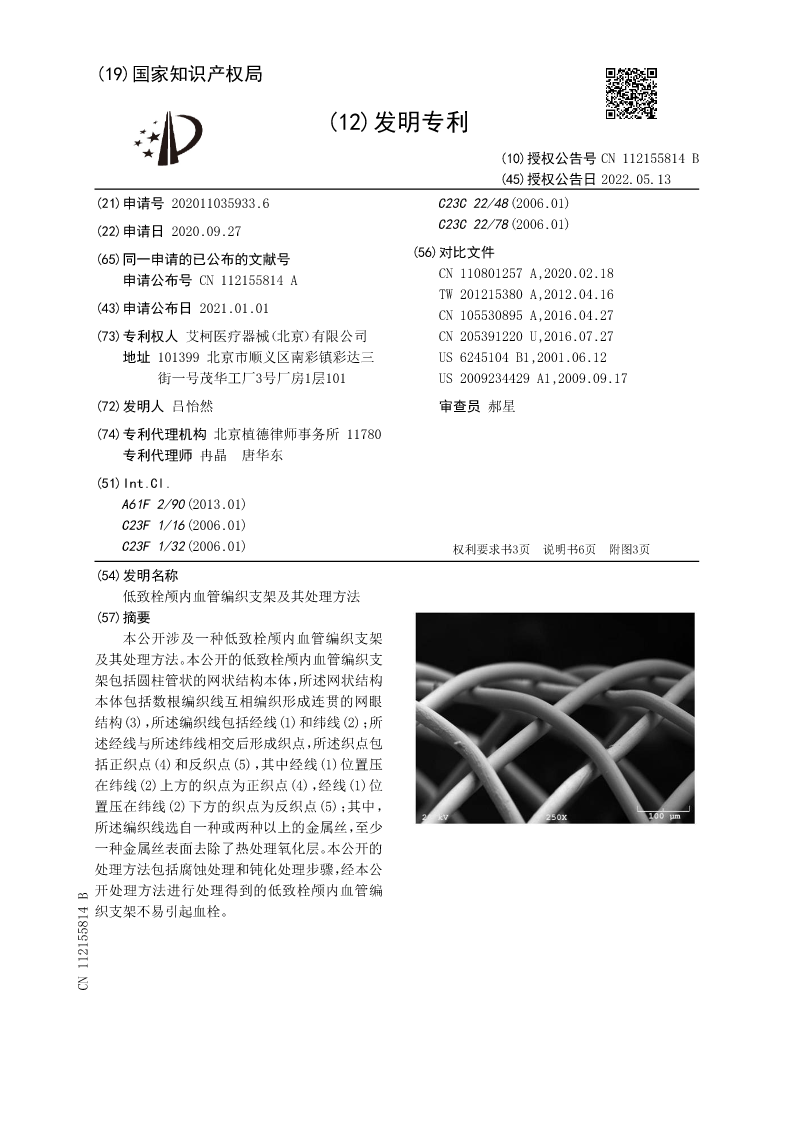
2020110359336低致栓颅内血管编织支架及其处理方法
2020110303186一种钙钛矿量子点聚合物粒子的制备方法
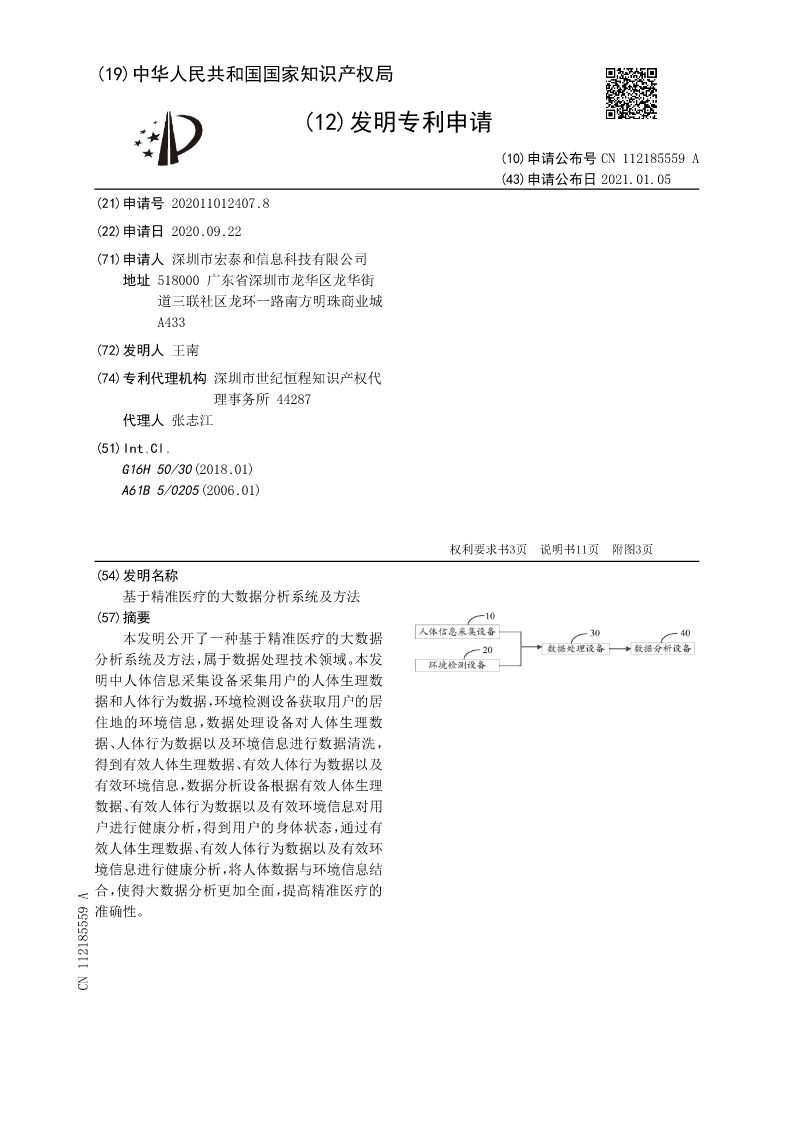
2020110124078基于精准医疗的大数据分析系统及方法
2020109651910 应用近红外谷物分析仪建立油莎豆中粗脂肪含量的检测方法
2020109529321一种铝合金用无氟无氯环保粒状精炼剂及其制备和应用
2020108899336一种新能源商用车总装车间线路布局
2020108620703城市燃气管网多输差协同计算模型及应用方法
2020108207369一种微交联阳离子型聚丙烯酰胺絮凝剂及其制备方法与应用
2020108035131一种基于全站仪的激光雷达外部参数标定方法
2020107682859一种内燃机等离子节油器阴阳极的制备方法

13****40
 实名认证
实名认证
 内容提供者
内容提供者
最近下载




