

如果您无法下载资料,请参考说明:
1、部分资料下载需要金币,请确保您的账户上有足够的金币
2、已购买过的文档,再次下载不重复扣费
3、资料包下载后请先用软件解压,在使用对应软件打开
(19)国家知识产权局 (12)发明专利申请 (10)申请公布号CN115857040A (43)申请公布日2023.03.28 (21)申请号202211711128.XG06V10/46(2022.01) (22)申请日2022.12.29G06V10/74(2022.01) (71)申请人江苏集萃智能光电系统研究所有限 公司 地址215300江苏省苏州市昆山开发区夏 东街689号10层 (72)发明人王大来贺旭阳魏智鹏吴伟康 (74)专利代理机构苏州国诚专利代理有限公司 32293 专利代理师顾阳 (51)Int.Cl. G01V8/10(2006.01) G06V20/52(2022.01) G06V10/10(2022.01) G06V10/24(2022.01) 权利要求书2页说明书5页附图3页 (54)发明名称 一种机车车顶异物动态视觉检测装置及方 法 (57)摘要 本发明提供了一种机车车顶异物动态视觉 检测装置及方法,不仅可实现高精度、高效率检 测,且可满足多类型机车、多样式异物的检测需 求;其包括数据采集模块、图像拼接模块、异物识 别模块、控制模块,其中,所述数据采集模块,用 于采集机车的行车信号数据和车顶图像数据;所 述图像拼接模块,与所述数据采集模块连接,用 于根据采集的数据进行图像特征提取,并实现图 像之间的拼接;所述异物识别模块,与所述图像 采集模块连接,用于根据生成的拼接图像数据实 现所述机车车顶异物识别;所述控制模块,与所 述数据采集模块、异物识别模块均相连接,用于 接收检测数据,并进行数据整合,以确定所述机 车车顶检测区域是否有异物。 CN115857040A CN115857040A权利要求书1/2页 1.一种机车车顶异物动态视觉检测装置,其特征在于:其包括数据采集模块、图像拼接 模块、异物识别模块、控制模块,其中, 所述数据采集模块,用于采集机车的行车信号数据和车顶图像数据; 所述图像拼接模块,与所述数据采集模块连接,用于根据采集的数据进行图像特征提 取,并实现图像之间的拼接; 所述异物识别模块,与所述图像采集模块连接,用于根据生成的拼接图像数据实现所 述机车车顶异物识别; 所述控制模块,与所述数据采集模块、异物识别模块均相连接,用于接收检测数据,并 进行数据整合,以确定所述机车车顶检测区域是否有异物。 2.根据权利要求1所述的一种机车车顶异物动态视觉检测装置,其特征在于:所述数据 采集模块包括若干组传感器组件,所述传感器组件布置于所述机车车顶上方的检测棚上, 每组所述传感器组件均包括敞口状的壳体,所述壳体内装有线阵相机和激光投射器,所述 线阵相机和激光投射器均连接于所述控制模块,所述线阵相机和激光投射器之间共线式安 装,以使得所述线阵相机成像与所述激光投射器的激光照射区域重合。 3.根据权利要求1所述的一种机车车顶异物动态视觉检测装置,其特征在于:所述数据 采集模块还包括用于感应所述机车车轮并产生磁钢信号的磁钢、用于检测磁钢信号的磁钢 信号检测模块,所述磁钢信号检测模块连接于所述控制模块,所述磁钢布置于轨道上。 4.根据权利要求2所述的一种机车车顶异物动态视觉检测装置,其特征在于:所述线阵 相机的分辨率不低于2048像素,帧频不低于80kHZ。 5.一种机车车顶异物动态视觉检测方法,其特征在于:其包括如权利要求1~4任一所 述的一种机车车顶异物动态视觉检测装置,所述检测方法还包括: 在检测到磁钢信号时,传感器组件工作以进行所述机车车顶图像数据采集; 将采集的图像数据进行图像特征提取,并将多个图像的重叠部分进行无缝拼接,随后 对拼接后的图像进行分块以生成若干所述机车车顶多个部位等长度的图像; 基于生成的所述机车车顶多部位图像,采用生成对抗网络对所述机车车顶图像中的异 物进行检测识别,以确定所述机车车顶检测区域是否有异物。 6.根据权利要求5所述的一种机车车顶异物动态视觉检测方法,其特征在于:进行图像 拼接还包括以下步骤: S1.1、采集多组线阵图像后,采用sift算法对图像进行特征点提取; S1.2、通过计算描述子对提取的特征点进行匹配,得到图像特征点匹配点对; S1.3、采用RANSAC方法获得两张待匹配图像之间的单应映射矩阵H,实现待匹配图像之 间的变换; S1.4、应用单应映射矩阵H对两张待匹配图像进行变换与融合,得到最终拼接后的图 像; S1.5、对拼接后的图像进行透视成像校正,并将图像校正为正视状态,随后根据所述机 车各部位的空间分布,将校正后的图像划分为所述机车车顶多个部位等长度的图像。 7.根据权利要求5所述的一种机车车顶异物动态视觉检测方法,其特征在于:对所述机 车车顶异物检测还包括以下步骤: S2.1、设定生成对抗网络模型并进行训练,将正常的所述机车车顶图像输入生
Ta的资源
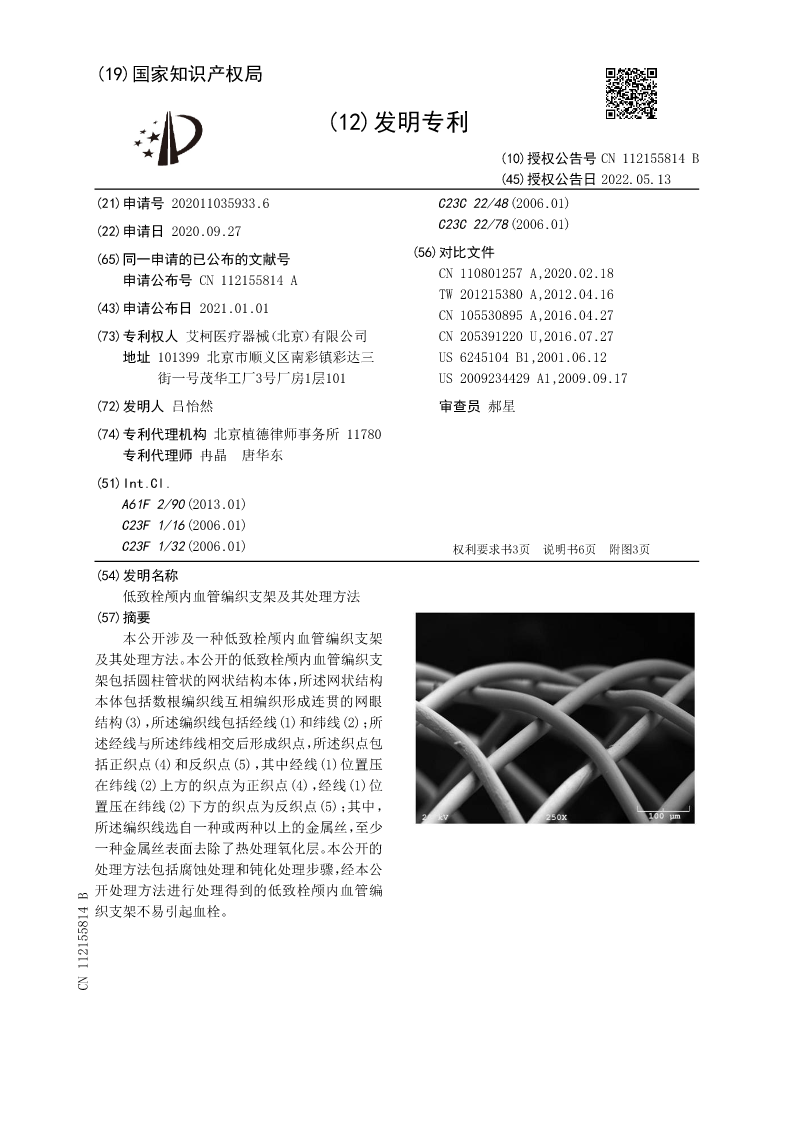
2020110359336低致栓颅内血管编织支架及其处理方法
2020110303186一种钙钛矿量子点聚合物粒子的制备方法
2020110124078基于精准医疗的大数据分析系统及方法
2020109651910 应用近红外谷物分析仪建立油莎豆中粗脂肪含量的检测方法
2020109529321一种铝合金用无氟无氯环保粒状精炼剂及其制备和应用
2020108899336一种新能源商用车总装车间线路布局
2020108620703城市燃气管网多输差协同计算模型及应用方法
2020108207369一种微交联阳离子型聚丙烯酰胺絮凝剂及其制备方法与应用
2020108035131一种基于全站仪的激光雷达外部参数标定方法
2020107682859一种内燃机等离子节油器阴阳极的制备方法

13****40
 实名认证
实名认证
 内容提供者
内容提供者
最近下载




