

如果您无法下载资料,请参考说明:
1、部分资料下载需要金币,请确保您的账户上有足够的金币
2、已购买过的文档,再次下载不重复扣费
3、资料包下载后请先用软件解压,在使用对应软件打开
(19)中华人民共和国国家知识产权局 (12)发明专利 (10)授权公告号CN106325100B (45)授权公告日2019.10.25 (21)申请号201610767433.9(56)对比文件 (22)申请日2016.08.30CN105793866A,2016.07.20, CN104528540A,2015.04.22, (65)同一申请的已公布的文献号CN105347195A,2016.02.24, 申请公布号CN106325100AEP1949312A1,2008.07.30, (43)申请公布日2017.01.11陈向东,胡元,张正得,焦博,王叶婷.轮式起 (73)专利权人徐州重型机械有限公司重机起重作业智能仿真系统综述《.工程机械与 地址221004江苏省徐州市云龙区铜山路维修》.2015,第1-7页. 165号审查员杜晓强 (72)发明人单增海胡元张正得王叶婷 陈伟 (74)专利代理机构南京纵横知识产权代理有限 公司32224 代理人董建林 (51)Int.Cl. G05B17/02(2006.01)权利要求书1页说明书5页附图3页 (54)发明名称 一种基于起重机车载控制系统的吊装模拟 方法 (57)摘要 本发明属于起重机车载控制系统领域,具体 涉及一种基于起重机车载控制系统的吊装模拟 方法,包括如下步骤(:1)建模:建模分为吊装设 备建模与作业环境建模(;2)工况优选及路径规 划(;3)吊装仿真:a.仿真过程及功能选择;b.碰 撞检测及最小距离计算;c.臂架变形显示;d.根 据仿真过程中起重机的工况设定、动作顺序、动 作方法进行记录,自动回放;根据仿真过程生成 能够驱动起重机操作的参数化程序段。本发明主 要有以下优点:本发明通过在起重机显示器上进 行吊装模拟,提高了吊装模拟的方便性、作业效 率;通过精确的计算模拟,包含臂架碰撞检测等 方法,对臂架系统能够精确的变形显示,提高了 作业的安全性。 CN106325100B CN106325100B权利要求书1/1页 1.一种基于起重机车载控制系统的吊装模拟方法,其特征在于,包括如下步骤: (1)建模:建模分为吊装设备建模与作业环境建模; (2)工况优选及路径规划:力限器控制器智能处理单元根据建模的吊装需求进行运算, 推荐满足吊装需求的工况,工况确定后,力限器控制器智能处理单元进行二次运算对吊装 路径进行规划; (3)吊装仿真: a.仿真过程及功能选择:起重机吊装仿真动作包含:起升、回转、变幅、伸缩、吊钩旋 转的动作;包含碰撞检测及最小距离计算、臂架变形显示、仿真过程录像及回放的辅助功 能; b.碰撞检测及最小距离计算:力限器控制器上采用图形颜色差异叠加的算法,根据实 时运动仿真计算的结果进行碰撞检测; c.臂架变形显示:力限器控制器中包含了通过吊重测试得到的臂架差值曲线的数学 模型,将通过臂架长度及角度传感器得到的臂架的节点坐标代入力限器控制器数学模型计 算得出每个节点的挠度及转角,调用骨骼节点计算模块将计算得到的挠度及转角加载到臂 架骨骼节点上,完成臂架系统的变形仿真,得到的臂架变形与起重机吊装过程中力限器控 制器控制的变形量完全一致,误差为零; d.根据仿真过程中起重机的工况设定、动作顺序、动作方法进行记录,自动回放;根据 仿真过程生成能够驱动起重机操作的参数化程序段。 2.根据权利要求1所述的一种基于起重机车载控制系统的吊装模拟方法,其特征在于, 吊装设备建模过程中,在起重机控制系统的显示器上画出对应的吊装设备外形;可对模型 进行位置修改。 3.根据权利要求1所述的一种基于起重机车载控制系统的吊装模拟方法,其特征在于, 力限器控制器智能处理单元根据建模的吊装需求进行运算后,如果工况满足不了吊装需 求,重新建模或者移动起重机站位,如果依然满足不了吊装需求,推荐其它能够满足需求的 起重机型号。 4.根据权利要求1所述的一种基于起重机车载控制系统的吊装模拟方法,其特征在于, 力限器控制器智能处理单元进行二次运算对吊装路径进行规划时,采用蚁群算法,将起重 机简化为3自由度机器人,建立相应的C-空间,考虑的因素包括路径最短、起重动作优先级 和切换次数、起重机起重性能以及多台起重机协调策略。 5.根据权利要求1所述的一种基于起重机车载控制系统的吊装模拟方法,其特征在于, 碰撞检测及最小距离计算过程中,在包围体层次结构基础上,采用基于穿透率的广义/狭义 二阶算法在剔除明显不相交的物体对,然后对可能相交的物体对作碰撞检测;最小距离计 算时遍历吊装设备模型、作业环境模型之间的相近点距离,根据模型位姿将法向相反方向 的模型点过滤。 6.根据权利要求1所述的一种基于起重机车载控制系统的吊装模拟方法,其特征在于, 硬件系统组成包括:起重机控制系统的显示器、力限器控制
Ta的资源
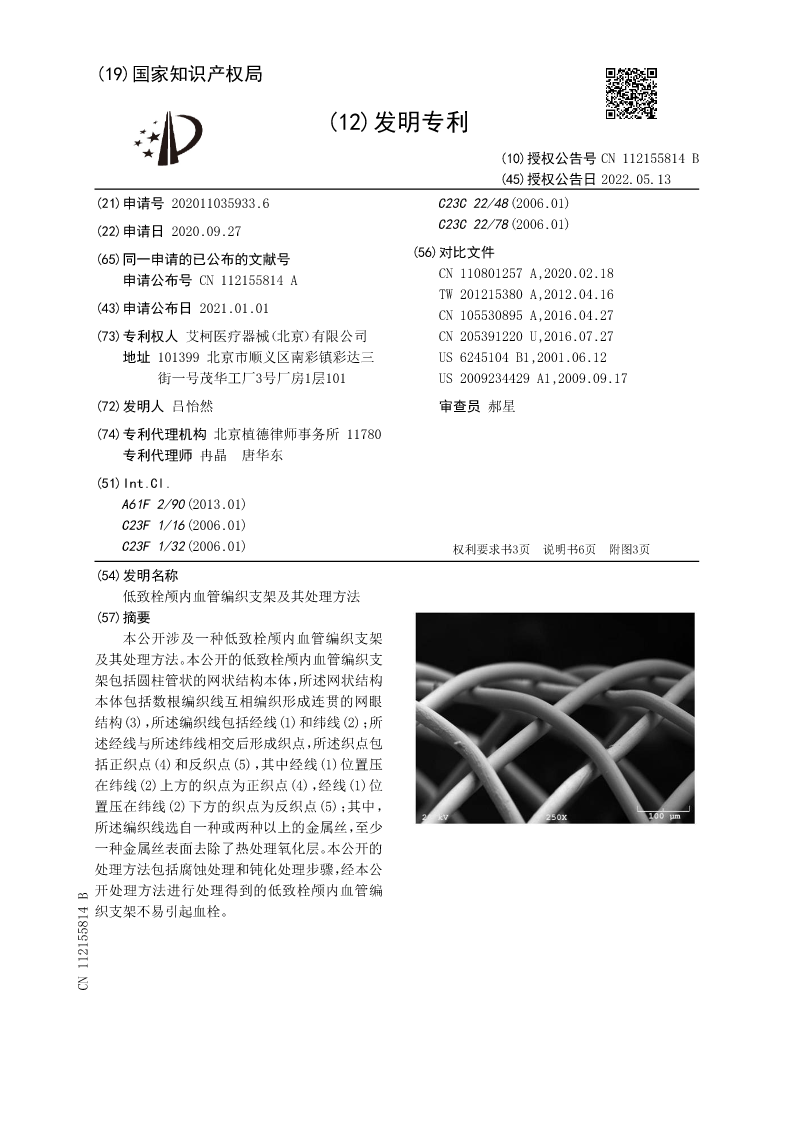
2020110359336低致栓颅内血管编织支架及其处理方法
2020110303186一种钙钛矿量子点聚合物粒子的制备方法
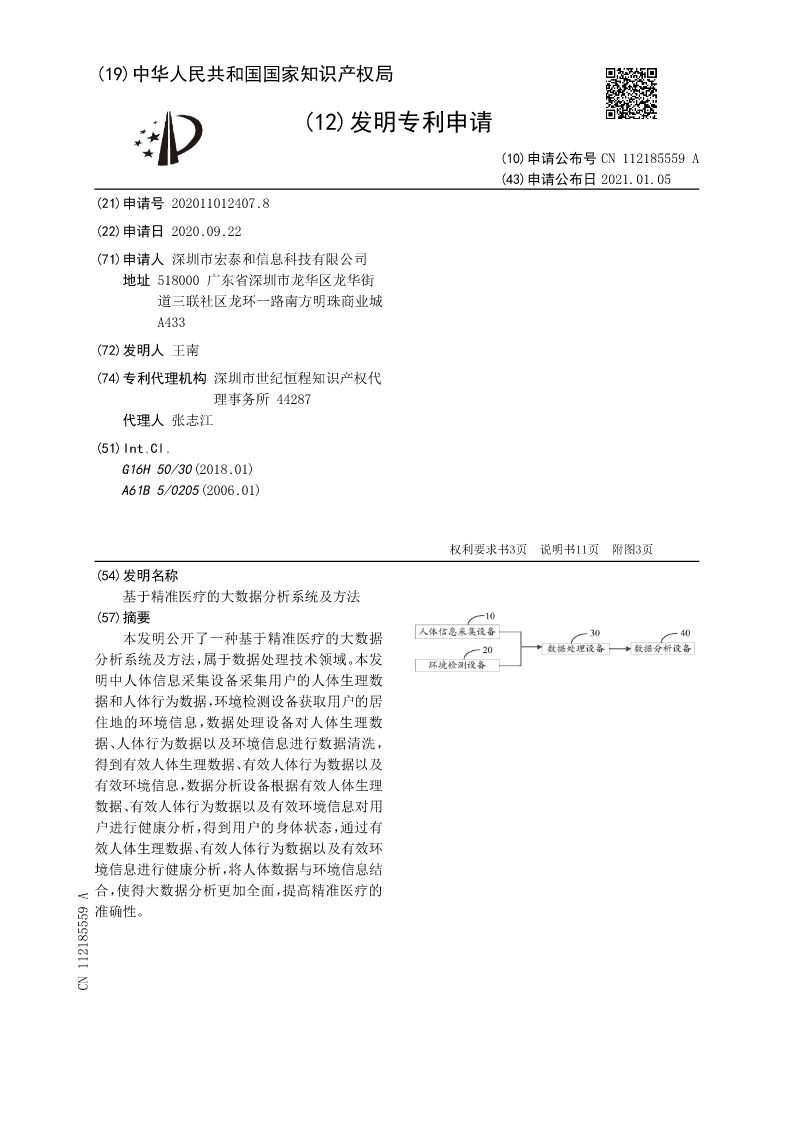
2020110124078基于精准医疗的大数据分析系统及方法
2020109651910 应用近红外谷物分析仪建立油莎豆中粗脂肪含量的检测方法
2020109529321一种铝合金用无氟无氯环保粒状精炼剂及其制备和应用
2020108899336一种新能源商用车总装车间线路布局
2020108620703城市燃气管网多输差协同计算模型及应用方法
2020108207369一种微交联阳离子型聚丙烯酰胺絮凝剂及其制备方法与应用
2020108035131一种基于全站仪的激光雷达外部参数标定方法
2020107682859一种内燃机等离子节油器阴阳极的制备方法

13****40
 实名认证
实名认证
 内容提供者
内容提供者
最近下载




