

如果您无法下载资料,请参考说明:
1、部分资料下载需要金币,请确保您的账户上有足够的金币
2、已购买过的文档,再次下载不重复扣费
3、资料包下载后请先用软件解压,在使用对应软件打开
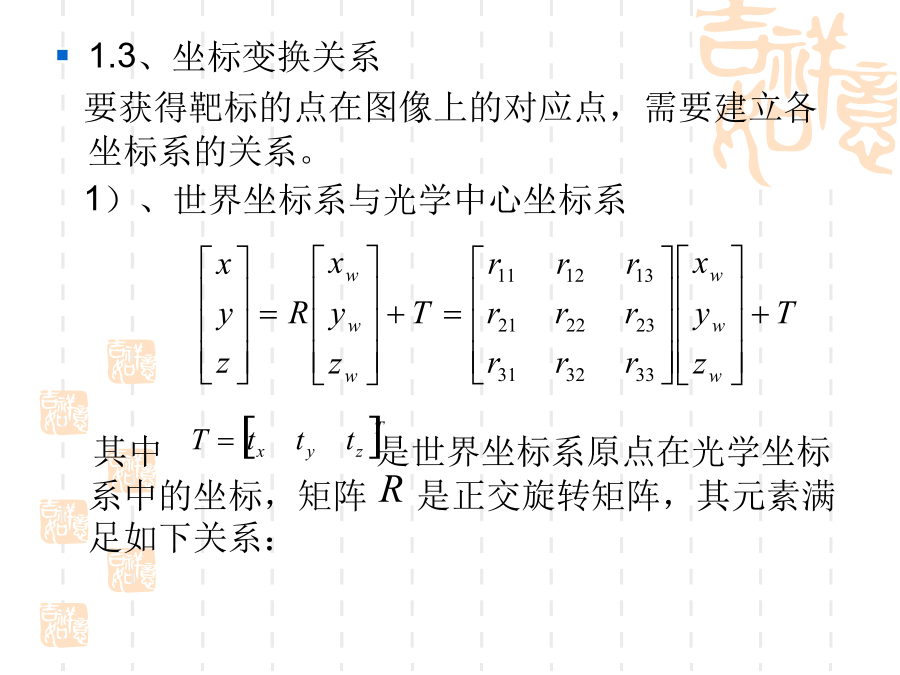
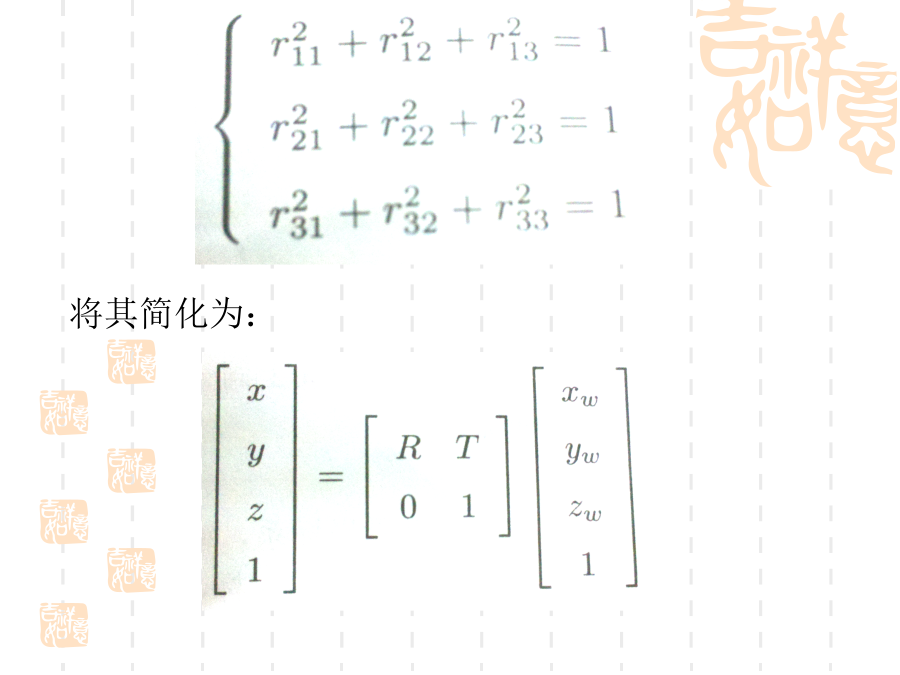
数码相机的定位1、模型的建立1.2、坐标系统 1)、世界坐标:现实世界坐标。题目中的靶标、相机以及相机中成的像都可以用该坐标表示。 2)、光学中心坐标系:以针孔相机模型的光学中心为原点,以光轴为轴的坐标系。 与像物理坐标的平行。 3)、像坐标系 像物理坐标系:原点为透镜光轴与成像平面的交点,单位mm。 像平面像素坐标系:原点一般在图像的左上角。平行于像平面物理坐标系。对于数字图像其值是离散的。将其简化为:光学中心坐标系与像平面坐标系关系 由小孔成像,光学坐标系中物点在像平面物理坐标系中坐标为:3)、世界坐标系与像平面坐标系关系 简化为:问题一 为了支持上述算法,针对问题一、二的求解提出以下引理和定理。 引理1物上的直线在像上也是直线 定理2像平面上的圆成像图形为椭圆 引理3物平面上距离不为0两点,在像上的距离也不为0。 定理4物平面上各圆的公切点对应到像上也是椭圆的公切点。 定理5物上两直线的交点对应到像上也是两直线的交点。2)、几何关系对应法 物像上的公切线交点为A,B,C,D,连接A,B,连接C,D,AB与CD交与O点,即圆心。在图像中交点A’,B’,C’,D’,交点O’,即为圆心对应的像点。问题二 上述两种方法都需要求出像椭圆的公切线,如果知道了公切线交点的坐标,将很容易通过一一对应的关系得到靶标上圆心的像素位置,进一步转化为像平面物理坐标。具体步骤: 1)、像平面上椭圆边界数据的提取。图像上每一个点都存在灰度值,0~黑色,255~白色,灰度发生突变的地方即为图形的边界,我们取相邻灰度值超过64的地方为边界,并提取出边界点的像素坐标。2)、最小二乘法拟合椭圆,得到椭圆的各个参数值。 3)、通过几何解析法,计算出两两椭圆的公切线,并求出公切线交点的坐标。 4)、求圆心对应的像点坐标。 ①、求出M矩阵,通过变换得到圆心对应的像点坐标。 ②、由椭圆周围4个交点确定两条交叉的直线,求交点,即为圆心像点坐标。a)、M矩阵法求圆心对应的像点坐标 为简化计算,将世界坐标系原点建立在物平面中心,于是,公式简化为: 所以只需4组对应点便可以求出M矩阵。则可以有圆心的世界坐标转换为像素坐标,在转换为像平面物理坐标(即所求)。 分别取3组不同对应点,分别计算,取圆心坐标的平均值。 b)、几何关系对应法 将每个椭圆周围两组公切线的交点(4个)交叉相连,得到的交点即为圆心对应的像点。再将像素坐标变换为像平面物理坐标。问题三:模型检验1)、模型误差:针孔模型是我们提出的假设,实际中相机是凸透镜成像,存在畸变。主要畸变类型为径向畸变,由光学镜头曲率的变化引起。也就是物象平面上的直线在图片上不是直线,而我们假设为直线。 2)、图像噪声误差:通常为电磁波对光波传播的干扰。 3)、计算误差:所用计算软件的精度所致,但此误差较小,可以忽略。 4)、量化误差:此误差为主要误差,由相机的分辨率引起,下面进行重点分析。a)、线性拟合误差 最小二乘法拟合曲线,由于像素是离散的点,拟合后许多点落在两侧,造成较大误差。 b)、像素面积大小引起的误差 由于像素自身有大小,则当像平面中的成像在某一像素区域内任意点则被视为同一点处理,显然带来误差。











xx****88
 实名认证
实名认证
 内容提供者
内容提供者
最近下载
一种胃肠道超声检查助显剂及其制备方法.pdf
201651206021+莫武林+浅析在互联网时代下酒店的营销策略——以湛江民大喜来登酒店为例.doc
201651206021+莫武林+浅析在互联网时代下酒店的营销策略——以湛江民大喜来登酒店为例.doc
用于空间热电转换的耐高温涡轮发电机转子及其装配方法.pdf
用于空间热电转换的耐高温涡轮发电机转子及其装配方法.pdf
用于空间热电转换的耐高温涡轮发电机转子及其装配方法.pdf
用于空间热电转换的耐高温涡轮发电机转子及其装配方法.pdf
用于空间热电转换的耐高温涡轮发电机转子及其装配方法.pdf
用于空间热电转换的耐高温涡轮发电机转子及其装配方法.pdf
论《离骚》诠释史中的“香草”意蕴.docx




